Esta figura muestra un brazo robótico hidráulico de siete ejes que rompe losas de hormigón, cada uno de 30 mm de espesor. Este es un prototipo para comparar con un robot de cuatro patas que también está siendo desarrollado en este proyecto por la Universidad de Waseda. Universidad Meiji, y otros, producido aproximadamente del mismo tamaño. Consta de siete de los nuevos motores hidráulicos. Crédito:Laboratorio Suzumori
Investigadores del Instituto de Tecnología de Tokio (Tokyo Tech) han desarrollado un actuador hidráulico que permitirá que robots resistentes operen en sitios de desastre y otros entornos hostiles. La Corporación Tokyo Tech Venture H-MUSCLE se estableció para buscar aplicaciones para el actuador, y el envío de muestras de productos comenzará en febrero de 2019.
La mayoría de los robots actuales funcionan con motores eléctricos, pero actuadores hidráulicos, con su alto rendimiento y resistencia al impacto, sería adecuado para robots que operan en entornos hostiles. Sin embargo, los actuadores hidráulicos típicos están desarrollados para maquinaria industrial, como palas eléctricas, y son demasiado grandes y pesados para ser utilizados en robots; tampoco pueden proporcionar un movimiento suave o un control de la fuerza.
El profesor de la Escuela de Ingeniería de Tokio, Koichi Suzumori, y sus colegas desarrollaron un actuador hidráulico para resolver estos problemas. El actuador ofrece una potencia y una resistencia a los golpes mucho mayores en comparación con los motores eléctricos convencionales. También otorga un tamaño más pequeño, mayor rendimiento (relación fuerza-masa), y un control más suave en comparación con los actuadores hidráulicos convencionales. Proporcionando alta potencia, durabilidad, y excelente control, El actuador permitirá a los robots operar en los entornos más duros y realizar trabajos duros con un toque suave.
Este actuador hidráulico es el resultado del Tough Robotics Challenge, organizado por el Programa Impulsando el Cambio de Paradigma a través de Tecnologías Disruptivas (ImPACT) de la Oficina del Gabinete de Japón. Tokyo Tech; JPN Co., Limitado.; Bridgestone Corporation; y KYB Corporation; junto con otras universidades y empresas relacionadas con equipos hidráulicos, han participado en el desarrollo del actuador hidráulico para robots resistentes desde 2014. Para promover la adopción de la tecnología, H-MUSCLE enviará muestras de sus cilindros hidráulicos y motores hidráulicos a los fabricantes nacionales, ampliar su línea de actuadores para la venta futura, y explorar otras aplicaciones.
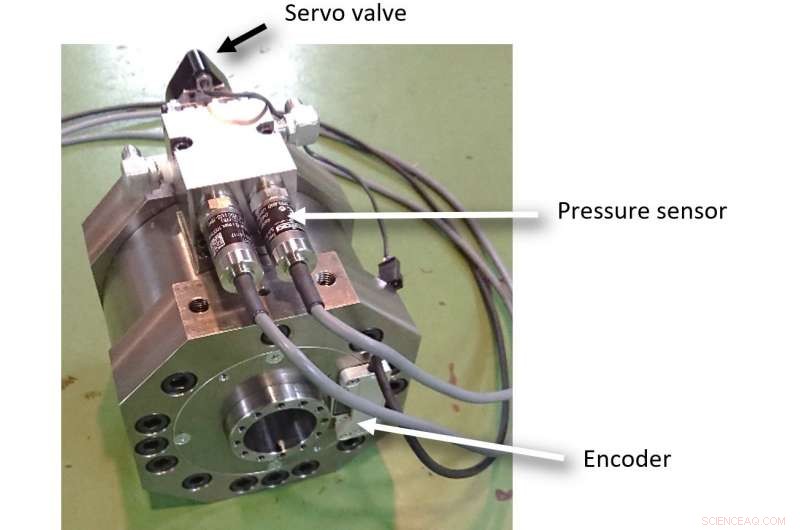
Un pequeño ligero, motor de deslizamiento suave. Crédito:laboratorio Suzumori
Fondo
El Desafío de Robótica Tough ImPACT (2014-2018, Director de programa:Satoshi Tadokoro, Profesor, Tohoku University) ha realizado una investigación con el objetivo de crear robots para operaciones difíciles, incluso en sitios de desastres extremos. Como parte de este proyecto, actuadores hidráulicos específicamente para robots y su aplicación robótica se estableció como tema de investigación. Koichi Suzumori (robótica, ingeniería de actuadores) en Tokyo Tech fue el líder del grupo con participantes Tokyo Tech; Universidad de Okayama; Universidad de Ritsumeikan, JPN Co., Limitado.; Bridgestone Corporation; y KYB Corporation. Con la cooperación de muchas otras empresas con tecnologías altamente especializadas, lograron desarrollar un actuador para robots hidráulicos que es pequeño, ligero, alto rendimiento, y deslizamiento suave, algo que no está disponible en productos existentes.
Méritos de lo pequeño, ligero, actuadores de deslizamiento suave
El nuevo actuador hidráulico ofrece los siguientes avances sobre los actuadores hidráulicos existentes.
ImPACT ha construido varios prototipos de robots resistentes para probar aplicaciones potenciales para el actuador hidráulico.
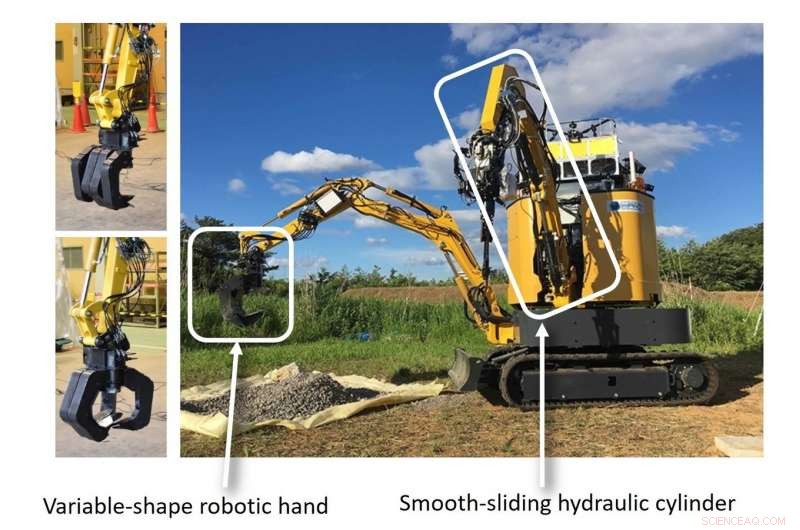
Un robot de construcción desarrollado por Komatsu, Universidad de Osaka, y otros. El más pequeño de los dos brazos es impulsado por cilindros de deslizamiento suave desarrollados en este programa, contribuyendo a su capacidad para realizar manipulaciones finas. El extremo del otro brazo está equipado con una mano hidráulica que utiliza el nuevo actuador hidráulico. Con cuatro dedos se puede utilizar en modo pala o en modo manual según sea necesario. En modo manual, puede agarrar objetos de diferentes formas y controlar la fuerza del agarre. Crédito:Komatsu, Universidad de Osaka, Instituto de Tecnología de Tokio