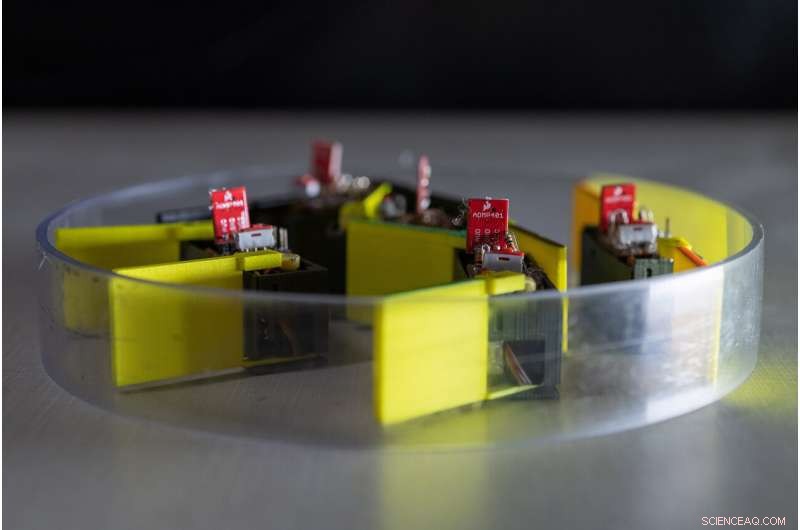
Cinco "smarticles" idénticos (partículas activas inteligentes) interactúan entre sí en un recinto. Dándose codazos unos a otros el grupo, apodado un "súper inteligente", puede moverse de manera aleatoria. Crédito:Georgia Tech, Rob Felt
La construcción de robots convencionales generalmente requiere combinar cuidadosamente componentes como motores, baterías actuadores, segmentos corporales, patas y ruedas. Ahora, los investigadores han adoptado un nuevo enfoque, construir un robot completamente a partir de robots más pequeños conocidos como "smarticles" para desbloquear los principios de una técnica de locomoción potencialmente nueva.
Los smarticles impresos en 3D, abreviatura de partículas activas inteligentes, solo pueden hacer una cosa:agitar sus dos brazos. Pero cuando cinco de estos smarticles se encierran en un círculo, comienzan a darse codazos, formando un sistema robofísico conocido como "supersmarticle" que puede moverse por sí mismo. Agregar un sensor de luz o sonido permite que el súper inteligente se mueva en respuesta al estímulo e incluso se controle lo suficientemente bien como para navegar por un laberinto.
Aunque rudimentario ahora, la noción de hacer robots a partir de robots más pequeños, y aprovechar las capacidades grupales que surgen al combinar individuos, podría proporcionar un control mecánico sobre robots muy pequeños. Por último, el comportamiento emergente del grupo podría proporcionar un nuevo enfoque de locomoción y control para pequeños robots que potencialmente podrían cambiar de forma.
"Estos son robots muy rudimentarios cuyo comportamiento está dominado por la mecánica y las leyes de la física, "dijo Dan Goldman, un profesor de la familia Dunn en la Escuela de Física del Instituto de Tecnología de Georgia. "No buscamos poner un control sofisticado, detección y cálculo en todos ellos. A medida que los robots se vuelven cada vez más pequeños, tendremos que usar los principios de la mecánica y la física para controlarlos porque no tendrán el nivel de cálculo y detección que necesitaríamos para el control convencional ".
La investigación, que fue apoyado por la Oficina de Investigación del Ejército y la Fundación Nacional de Ciencias, está programada para su publicación el 18 de septiembre en la revista Ciencia Robótica . Investigadores de la Northwestern University también contribuyeron al proyecto.
La base de la investigación provino de una fuente poco probable:un estudio de los elementos básicos de la construcción. Al verter estas grapas resistentes en un recipiente con lados extraíbles, ex Ph.D. El estudiante Nick Gravish, ahora miembro de la facultad de la Universidad de California en San Diego, creó estructuras que se mantendrían por sí solas después de que se retiraran las paredes del contenedor.
Sacudir las torres de grapas eventualmente hizo que colapsaran, pero las observaciones llevaron a la comprensión de que el simple entrelazamiento de objetos mecánicos podría crear estructuras con capacidades mucho más allá de las de los componentes individuales.
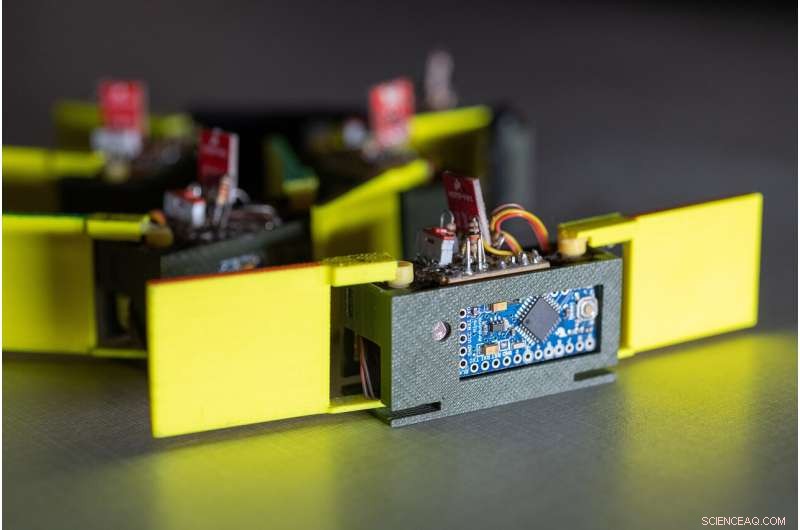
Primer plano de un "smarticle" (partícula activa inteligente) que muestra los dos brazos impresos en 3D, sensor de luz y motor. Crédito:Georgia Tech, Rob Felt
"Un robot hecho de otros robots rudimentarios se convirtió en la visión, Goldman dijo:"Podrías imaginar hacer un robot en el que modificarías un poco sus parámetros geométricos y lo que surge son comportamientos cualitativamente nuevos".
Para explorar el concepto, Will Savoie, asistente de investigación graduado, usó una impresora 3-D para crear smarticles a batería, que tienen motores, sensores simples y potencia informática limitada. Los dispositivos pueden cambiar su ubicación solo cuando interactúan entre sí mientras están encerrados por un anillo.
"Aunque ningún robot individual puede moverse por sí solo, la nube compuesta por varios robots podría moverse a medida que se separaba y encogerse a medida que se juntaba, "Goldman explicó." Si pones un anillo alrededor de la nube de pequeños robots, comienzan a patearse entre sí y el anillo más grande, lo que llamamos un súper inteligente, se mueve al azar ".
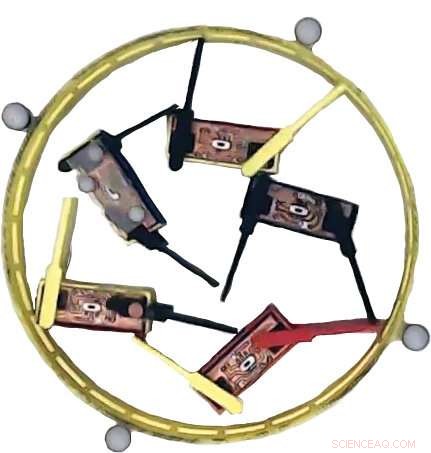
Un supersmarticle. Crédito:Savoie et al., Sci. Robot. 4, eaax4316 (2019)
Los investigadores notaron que si un pequeño robot dejaba de moverse, quizás porque se le acabó la batería, el grupo de smarticles comenzaría a moverse en la dirección de ese robot atascado. El estudiante de posgrado Ross Warkentin aprendió a controlar el movimiento agregando fotosensores a los robots que detienen el aleteo del brazo cuando un fuerte rayo de luz golpea a uno de ellos.
"Si inclinas la linterna a la derecha, puede resaltar el robot que desea que esté inactivo, y eso hace que el anillo se acerque o se aleje de él, aunque no hay robots programados para moverse hacia la luz, "Dijo Goldman." Eso permitió dirigir el conjunto de una manera muy rudimentaria, forma estocástica ".
El profesor de la Escuela de Física Kurt Wiesenfeld y el estudiante de posgrado Zack Jackson modelaron el movimiento de estos smarticles y supersmarticles para comprender cómo los empujones y la masa del anillo afectaban el movimiento general. Investigadores de la Universidad Northwestern estudiaron cómo las interacciones entre los dispositivos inteligentes proporcionaban control direccional.
"Para muchos robots, tenemos motores de movimiento de corriente eléctrica que generan fuerzas en partes que colectivamente mueven un robot de manera confiable, " said Todd Murphey, a professor of mechanical engineering who worked with Northwestern graduate students Thomas Berrueta and Ana Pervan. "We learned that although individual smarticles interact with each other through a chaos of wiggling impacts that are each unpredictable, the whole robot composed of those smarticles moves predictably and in a way that we can exploit in software."
En el trabajo futuro, Goldman envisions more complex interactions that utilize the simple sensing and movement capabilities of the smarticles. "People have been interested in making a certain kind of swarm robots that are composed of other robots, " he said. "These structures could be reconfigured on demand to meet specific needs by tweaking their geometry."
The project is of interest to the U.S. Army because it could lead to new robotic systems capable of changing their shapes, modalities and functions, said Sam Stanton, director del programa, complex dynamics and systems at the Army Research Office, an element of U.S. Army Combat Capabilities Development Command's Army Research Laboratory.
"Future Army unmanned systems and networks of systems are imagined to be capable of transforming their shape, modality and function. Por ejemplo, a robotic swarm may someday be capable of moving to a river and then autonomously forming a structure to span the gap, " he said. "Dan Goldman's research is identifying physical principles that may prove essential for engineering emergent behavior in future robot collectives as well as new understanding of fundamental trade-offs in system performance, responsiveness, uncertainty, resiliency and adaptivity."