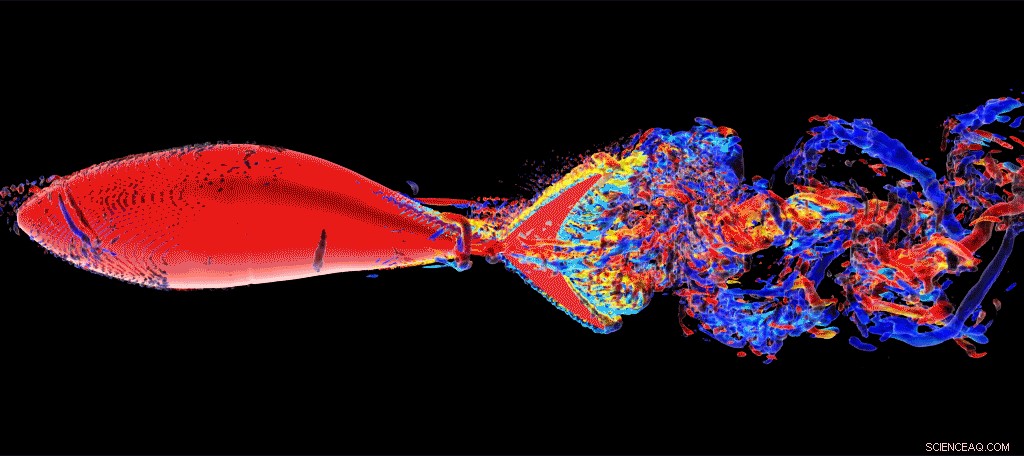
Desarrollo de una plataforma experimental de alta frecuencia que explora el espacio de actuación de los peces nadadores. Crédito:Haibo Dong
Ingenieros mecánicos de la Escuela de Ingeniería de la Universidad de Virginia, liderando una colaboración con biólogos de la Universidad de Harvard, han creado el primer pez robótico que se ha demostrado que imita la velocidad y los movimientos del atún aleta amarilla vivo.
Su artículo revisado por pares, "Robótica del atún:una plataforma experimental de alta frecuencia que explora el espacio de actuación de los peces nadadores, "fue publicado el 18 de septiembre de 2019, en Ciencia Robótica .
Dirigido por Hilary Bart-Smith, profesor del Departamento de Ingeniería Mecánica y Aeroespacial de UVA Engineering, el proyecto del atún robótico nació en un período de cinco años, $ 7.2 millones Iniciativa de investigación universitaria multidisciplinaria la Oficina de Investigación Naval de los EE. UU. Otorgó a Bart-Smith para estudiar rápido, natación eficiente de diferentes peces. El objetivo del proyecto de Bart-Smith es comprender mejor la física de la propulsión de los peces, investigación que eventualmente podría informar el desarrollo de la próxima generación de vehículos submarinos, impulsado por sistemas similares a los peces mejor que las hélices.
Los robots submarinos también son útiles en una variedad de aplicaciones, como defensa, exploración de recursos marinos, inspección de infraestructura y recreación.
Mucho antes de que los sistemas de propulsión bioinspirados puedan volverse viables para uso público y comercial en vehículos tripulados y no tripulados, sin embargo, los investigadores deben poder comprender de manera confiable cómo los peces y otras criaturas se mueven a través del agua.
"Nuestro objetivo no era solo construir un robot. Realmente queríamos comprender la ciencia de la natación biológica, ", Dijo Bart-Smith." Nuestro objetivo era construir algo en lo que pudiéramos probar hipótesis en términos de lo que hace que los nadadores biológicos sean tan rápidos y eficientes ".
El equipo primero necesitaba estudiar la mecánica biológica de los nadadores de alto rendimiento. El profesor de biología de Harvard, George V. Lauder, y su equipo de investigadores midieron con precisión la dinámica de natación del atún aleta amarilla y la caballa. Usando esos datos, Bart-Smith y su equipo, el científico investigador Jianzhong "Joe" Zhu y Ph.D. estudiante Carl White, construyó un robot que no solo se movía como un pez bajo el agua, sino que batía su cola lo suficientemente rápido como para alcanzar velocidades casi equivalentes.
Luego compararon el robot al que llamaron "Tunabot" con especímenes vivos.
"Hay muchos artículos sobre robots de peces, pero la mayoría de ellos no contienen muchos datos biológicos. Así que creo que este artículo es único en la calidad tanto del trabajo robótico como de los datos biológicos unidos en un solo artículo, "Dijo Lauder.
"Lo fantástico de los resultados que presentamos en el artículo son las similitudes entre la biología y la plataforma robótica, no solo en términos de la cinemática de natación, sino también en términos de la relación entre la velocidad y la frecuencia de los latidos de la cola y el rendimiento energético, ", Dijo Bart-Smith." Estas comparaciones nos dan confianza en nuestra plataforma y su capacidad para ayudarnos a comprender más sobre la física de la natación biológica ".
El trabajo del equipo se basa en las fortalezas de UVA Engineering en sistemas autónomos. El Departamento de Ingeniería Mecánica y Aeroespacial participa en el Link Lab de UVA Engineering para sistemas ciberfísicos, que se centra en ciudades inteligentes, sistemas autónomos y sanitarios inteligentes, incluidos los vehículos autónomos.
El proyecto Tunabot es una consecuencia del segundo proyecto de Bart-Smith, Iniciativa de investigación universitaria multidisciplinaria altamente competitiva de la Oficina de Investigación Naval; en 2008, Bart-Smith recibió un premio de $ 6.5 millones para desarrollar un robot submarino inspirado en una manta raya.
Las pruebas de Tunabot tienen lugar en un gran laboratorio en el Edificio de Ingeniería Mecánica y Aeroespacial de UVA Engineering, en un tanque de flujo que ocupa aproximadamente una cuarta parte de la habitación, y en la Universidad de Harvard en una instalación similar. El sin ojos El pez réplica sin aleta mide aproximadamente 10 pulgadas de largo; el equivalente biológico puede medir hasta dos metros de largo. Una correa de hilo de pescar mantiene estable al robot, mientras que una luz láser verde atraviesa la línea media del pez de plástico. El láser mide el movimiento del fluido desprendido por el robot con cada barrido de su cola fabricada. A medida que se acelera la corriente de agua en el tanque de flujo, la cola y todo el cuerpo del Tunabot se mueven en un patrón de flexión rápido, similar a la forma en que nada un atún aleta amarilla vivo.
"Vemos en la literatura sobre robótica de peces hasta ahora que hay sistemas realmente geniales que otros han creado, pero los datos a menudo son inconsistentes en términos de selección y presentación de la medición. Es solo el estado actual del campo de la robótica en este momento. Nuestro artículo sobre el Tunabot es importante porque nuestros datos de rendimiento completos establecen el listón muy alto, "Dijo White.
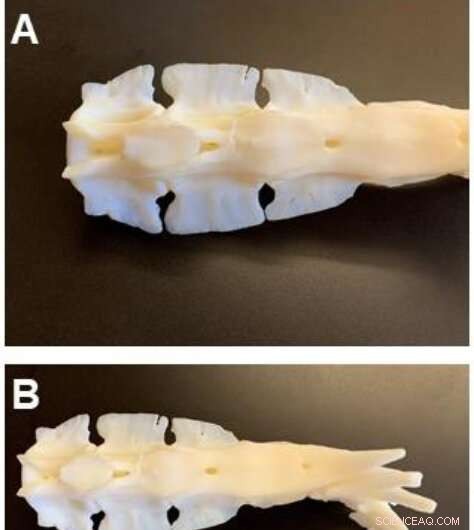
Impresiones en 3D del esqueleto del pedúnculo caudal (el área donde se adhiere la aleta caudal) en un atún blanco. Crédito:Zhu et al., Sci. Robot. 4, eaax4615 (2019)
La relación entre biología y robótica es circular, Lauder dijo. "Una de las razones por las que creo que tenemos un programa de investigación exitoso en esta área es por la gran interacción entre biólogos y roboticistas". Cada descubrimiento en una rama informa a la otra, un tipo de circuito de retroalimentación educativa que avanza constantemente tanto en la ciencia como en la ingeniería.
"No asumimos que la biología haya evolucionado hacia la mejor solución, ", Dijo Bart-Smith." Estos peces han tenido mucho tiempo para evolucionar hacia una solución que les permita sobrevivir, específicamente, comer, reproducirse y no ser comido. Sin restricciones por estos requisitos, podemos centrarnos únicamente en los mecanismos y funciones que promueven un mayor rendimiento, mayor velocidad, mayor eficiencia. Nuestro objetivo final es superar la biología. ¿Cómo podemos construir algo que se parezca a la biología pero que nada más rápido que cualquier cosa que veas en el océano? "