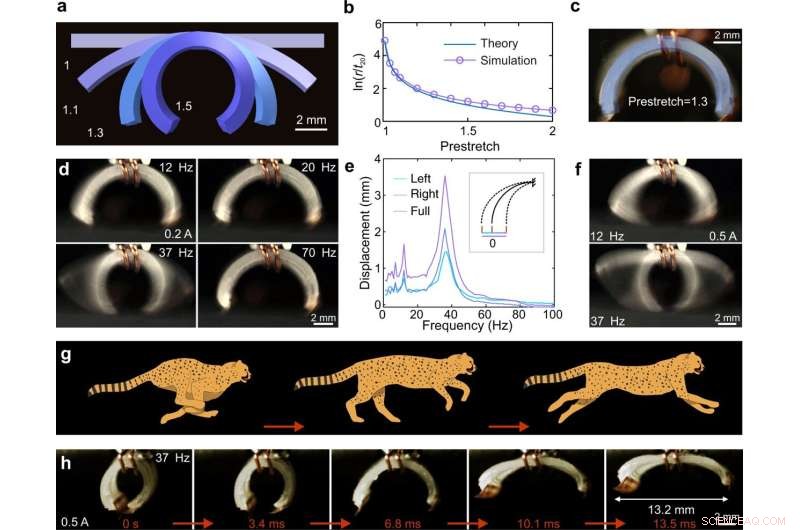
Diseño y caracterización de SEMRs de pequeña escala. a Forma simulada de la película bicapa con diferentes preestiramientos:1.0, 1.1, 1.3 y 1.5. b Radio simulado y calculado de la película bicapa en función del preestirado aplicado. c Imágenes superpuestas de las formas SEMR experimentales y simuladas (vista lateral) con un estiramiento previo de 1,3. d Instantáneas de las vibraciones SEMR para una corriente de onda cuadrada de 0,2 A con diferentes frecuencias (Película complementaria 2). Los marcos de 37 Hz y 12 Hz corresponden al principal y al segundo máximo espectral más grande, que se puede ver en e. e Desplazamiento horizontal del pie izquierdo del robot sujeto a una corriente de onda cuadrada de 0,2 A a diferentes frecuencias (Película complementaria 2). El robot se monta en la parte superior de un imán y se sujeta en el medio con cables de cobre. El recuadro ilustra tres desplazamientos (Izquierda, Derecha y Completa). Corresponden al desplazamiento máximo desde la posición de referencia “0” (sin corriente) hacia la izquierda (extensión), derecha (contracción) y su suma, respectivamente. La curva superior (Full) muestra el rango completo del desplazamiento del pie. f Los fotogramas de la prueba de vibración para corrientes de onda cuadrada de 0,5 A a frecuencias de 12 Hz y 37 Hz (Película complementaria 2) ilustran el rango de movimiento lejos y cerca de la frecuencia de resonancia. g Ilustración que muestra un guepardo corriendo. h Instantáneas del video de la cámara de alta velocidad (Película complementaria 2), que muestran las etapas del movimiento del robot impulsado por una corriente de onda cuadrada (0.5 A, 37 Hz). Crédito:Comunicaciones de la naturaleza (2022). DOI:10.1038/s41467-022-32123-4
Un equipo de investigadores de la Universidad Johannes Kepler, en Austria, ha desarrollado una serie de diminutos robots electromecánicos dirigibles que pueden caminar, correr, saltar y nadar a altas velocidades para su tamaño. En su artículo publicado en la revista Nature Communications, el grupo describe cómo construyeron sus robots y sugiere posibles usos para ellos.
Como señalan los investigadores, muchos animales pueden moverse rápidamente, por ejemplo, los guepardos o las gacelas. Estos rasgos han evolucionado para ayudar a los animales a capturar presas o eludir la captura de los depredadores. Crear robots con capacidades de velocidad similares ha sido un objetivo de los científicos durante muchos años, pero lograrlo ha resultado ser difícil. En este nuevo esfuerzo, los investigadores construyeron una serie de robots utilizando actuadores electromagnéticos pequeños y suaves con bobinas de metal líquido integradas que son rápidas para su tamaño.
Para hacer sus robots, los investigadores imprimieron bobinas de metal líquido en diferentes sustratos que tenían diferentes características deseables, como la capacidad de flexión. Las bobinas se imprimieron de una manera que permitiría manipular diferentes partes del sustrato de la manera deseada; doblar solo una parte, por ejemplo, podría permitir que la parte trasera se balanceara como una cola al nadar como un pez. Doblar otras partes permitió caminar, saltar y conducir. Los investigadores también agregaron otros elementos para mejorar el rendimiento, como dientes de sierra o pies en forma de L. Todos los robots se controlaron mediante un campo magnético y se alimentaron mediante una correa o un paquete de baterías.
Los investigadores utilizaron longitudes corporales por segundo (BL/s), lo que permite realizar comparaciones no solo con otros robots diminutos, sino también con robots de todos los tamaños e incluso con animales. Un coche de carreras de fórmula I, por ejemplo, puede moverse a aproximadamente 50 BL/s.
Al probar sus robots, los investigadores descubrieron que su robot atado del tamaño de un sello de correos podía moverse a aproximadamente 70 BL/s en su mejor superficie y aproximadamente a 35 BL/s en superficies arbitrarias:su robot sin ataduras, cargado con un paquete de baterías, solo podía manejar 2.1 BL/s. También descubrieron que su robot de natación atado podía nadar a aproximadamente 4,8 BL/s. Para poner los resultados en perspectiva, un guepardo corre entre 20 y 30 BL/s.
© 2022 Red Ciencia X Pequeño robot con forma de pez 'nada' recogiendo microplásticos