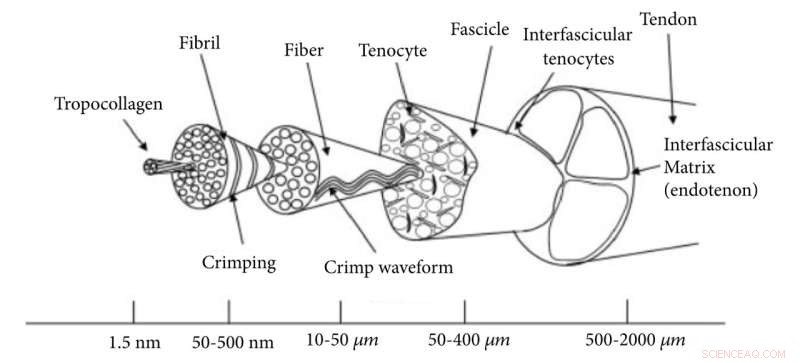
Estructura jerárquica del tejido tendinoso (adaptado de Thorpe et al). Crédito:Cyborg y Bionic Systems (2022). DOI:10.34133/2022/9842169
Un artículo de revisión realizado por científicos de la Universidad de Oxford discutió los posibles beneficios del uso de robots musculoesqueléticos humanoides y sistemas robóticos blandos como plataformas de biorreactores para producir construcciones de tendones clínicamente útiles.
El nuevo artículo de revisión, publicado el 15 de septiembre de 2022 en la revista Cyborg and Bionic Systems , resume las tendencias actuales en la ingeniería de tejidos tendinosos y analiza cómo los biorreactores convencionales no pueden proporcionar una estimulación mecánica fisiológicamente relevante dado que dependen en gran medida de etapas de tracción uniaxiales. Luego, el documento destaca los robots humanoides musculoesqueléticos y los sistemas robóticos blandos como plataformas para proporcionar estimulación mecánica fisiológicamente relevante que podría superar esta brecha de traducción.
Las lesiones de tendones y tejidos blandos son un problema social y económico creciente, con un mercado de reparación de tendones en los Estados Unidos estimado en $ 1.5 mil millones de dólares. Las cirugías de reparación de tendones tienen altas tasas de revisión, con más del 40 % de las reparaciones del manguito rotador que fallan después de la operación. La producción de injertos de tendones diseñados para uso clínico es una solución potencial para este desafío. Los biorreactores de tendón convencionales proporcionan principalmente estimulación de tracción uniaxial. La falta de sistemas que recapitulen la carga del tendón in vivo es una importante brecha de traducción.
"El cuerpo humano proporciona a los tendones tensión mecánica tridimensional en forma de tensión, compresión, torsión y cizallamiento. La investigación actual sugiere que el tejido sano del tendón nativo requiere múltiples tipos y direcciones de tensión. Los sistemas robóticos avanzados, como los humanoides musculoesqueléticos y los plataformas prometedoras de robótica que pueden imitar la carga de tendones in vivo", explicó el autor Iain Sander, investigador de la Universidad de Oxford con el Grupo de Investigación de Ingeniería de Tejidos Blandos.
Los robots humanoides musculoesqueléticos se diseñaron inicialmente para aplicaciones tales como maniquíes de prueba de choque, prótesis y mejora atlética. Intentan imitar la anatomía humana al tener proporciones corporales, estructura esquelética, disposición muscular y estructura articular similares. Los humanoides musculoesqueléticos como Roboy y Kenshiro usan sistemas impulsados por tendones con actuadores miorrobóticos que imitan el tejido neuromuscular humano.
Las unidades miorobóticas consisten en un motor de CC sin escobillas que genera tensión como los músculos humanos, cables de conexión que actúan como la unidad del tendón y una placa de control del motor con un codificador de resorte, que actúa como el sistema neurológico al detectar variables que incluyen tensión, compresión y longitud muscular. y temperatura.
Las ventajas propuestas de los humanoides musculoesqueléticos incluyen la capacidad de proporcionar carga multiaxial, el potencial de carga teniendo en cuenta los patrones de movimiento humano y la provisión de magnitudes de carga comparables a las fuerzas in vivo. Un estudio reciente ha demostrado la viabilidad de cultivar tejido humano en un robot humanoide musculoesquelético para la ingeniería de tendones.
La robótica blanda biohíbrida se centra en el desarrollo de sistemas robóticos compatibles y biomiméticos que permiten interacciones adaptables y flexibles con entornos impredecibles. Estos sistemas robóticos se activan a través de una serie de modalidades, que incluyen temperatura, presión neumática e hidráulica y luz.
Están hechos de materiales blandos que incluyen hidrogeles, caucho e incluso tejido musculoesquelético humano. Estos sistemas ya se están utilizando para proporcionar estimulación mecánica a construcciones de tejido de músculo liso y se han implementado in vivo en un modelo porcino.
Estos sistemas son atractivos para la ingeniería de tejidos de tendones dado que:i) sus propiedades flexibles y compatibles les permiten envolver estructuras anatómicas, imitando la configuración del tendón nativo ii) son capaces de proporcionar una actuación multiaxial y iii) varias de las técnicas utilizadas en la robótica blanda se superpone con las prácticas actuales de ingeniería de tejidos tendinosos.
De cara al futuro, el equipo visualiza sistemas robóticos avanzados como plataformas que proporcionarán un estímulo mecánico fisiológicamente relevante a los injertos de tendón antes de su uso clínico. Hay una serie de desafíos a considerar a medida que se implementan sistemas robóticos avanzados. En primer lugar, será importante para futuros experimentos comparar las tecnologías propuestas en esta revisión con los biorreactores convencionales.
Con el desarrollo de sistemas capaces de proporcionar cargas multiaxiales, será importante encontrar métodos para cuantificar la deformación en 3D. Finalmente, los sistemas robóticos avanzados deberán ser más asequibles y accesibles para una implementación generalizada.
"Cada vez más grupos de investigación están demostrando que es factible usar robótica avanzada en combinación con células y tejidos vivos para aplicaciones de ingeniería de tejidos y bioactuación. Ahora nos encontramos en una etapa emocionante en la que podemos explorar las diferentes posibilidades de incorporar estas tecnologías en ingeniería de tejidos de tendones y examinar si realmente pueden ayudar a mejorar la calidad de los injertos de tendones diseñados", dijo Pierre-Alexis Mouthuy, autor principal del artículo de revisión.
A largo plazo, estas tecnologías tienen potencial para mejorar la calidad de vida de las personas, al disminuir el dolor y el riesgo de falla en la reparación del tendón, para los sistemas de atención médica, al reducir el número de cirugías de revisión y para la economía, al mejorar la productividad en el lugar de trabajo y reducir costes sanitarios. Uso de un hombro robótico para hacer crecer tejido tendinoso