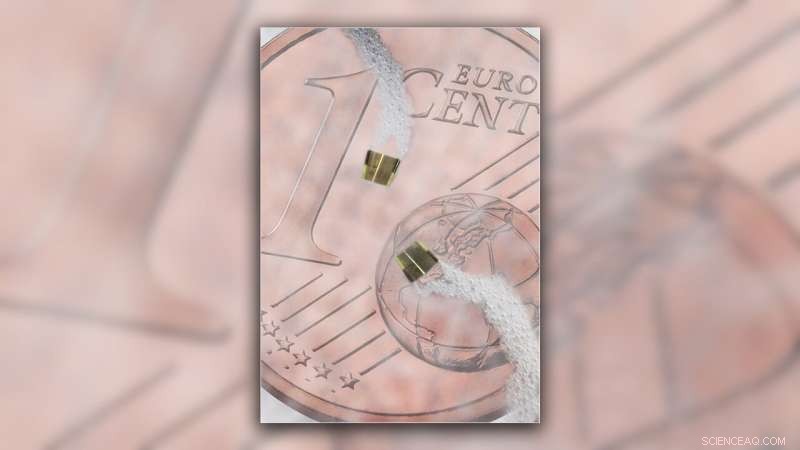
Los microrobots electrónicos autopropulsados más pequeños desarrollados por los investigadores maniobran en líquido sobre una moneda de 1 céntimo de euro. Crédito:TU Chemnitz.
Un equipo de investigación internacional dirigido por el Dr. Oliver Schmidt, trabajando en la Universidad Tecnológica de Chemnitz (TU Chemnitz) y Leibniz IFW Dresden ha desarrollado recientemente un sistema microrobítico con una amplia gama de posibles aplicaciones, que van desde la realización de microcirugías hasta la entrega de productos a los seres humanos. Este robot presentado en un artículo publicado en Electrónica de la naturaleza , se basa en una idea presentada por el mismo equipo de investigadores hace casi una década.
"Empezamos a explorar la idea de crear un diminuto sistema microrobótico que sea autopropulsado por un potente motor a reacción y que tenga componentes microelectrónicos a bordo hace casi diez años, ", Dijo Schmidt a TechXplore." Nuestra idea inicial era construir un microsistema autopropulsado inteligente que pueda interactuar con células biológicas individuales, que son de tamaño similar al propio microsistema. Este sistema debería poder moverse, sentir su entorno, transporte de carga, entregar medicamentos y realizar microcirugías ".
Desde que Schmidt y sus colegas introdujeron por primera vez su concepto de sistema microrobótico, su equipo y varios otros en todo el mundo han intentado crear tecnologías similares, principalmente in vitro (es decir, utilizando placas de Petri). Implementando como un sistema dentro del cuerpo humano, sin embargo, ha demostrado ser mucho más desafiante. De hecho, para completar tareas dentro del cuerpo, el sistema debería ser controlado desde el exterior y la información que recopila (por ejemplo, datos de diagnóstico) debería transmitirse fácilmente al mundo exterior (por ejemplo, a médicos o profesionales sanitarios).
"Para que un sistema microrobótico funcione en el cuerpo humano, debe contener energía eléctrica, sensores, actuadores, antenas y circuitos microelectrónicos, ", Explicó Schmidt." El objetivo principal de nuestro trabajo reciente era dar un gran paso hacia este objetivo final (y ciertamente muy ambicioso); todavía de una manera simplificada, por supuesto."
Schmidt y sus colegas fabricaron su microsistema flexible integrando micro y nano componentes electrónicos en la superficie de un chip, de manera similar a como se usa la tecnología de silicio para construir chips de computadora. Una diferencia clave entre su sistema y los chips de computadora habituales, sin embargo, es que el diseño del primero incluye motores a reacción creados con un enfoque iniciado hace aproximadamente veinte años, que no se utiliza normalmente en el desarrollo de la microelectrónica convencional.
"El truco consiste en colocar materiales delgados muy tensos en el chip, que se ajustan (enrollan) en estructuras de microtubos de rollo suizo, cuando se deslaminan de la superficie de la viruta, ", Dijo Schmidt." Este procedimiento se puede controlar bien, de modo que los microtubos enrollados estén firmemente conectados en dos lados opuestos al sistema microrobótico. Si estos microtubos están cubiertos con platino por dentro, Las burbujas de oxígeno son generadas por una reacción catalítica. una vez que el platino entra en contacto con una solución acuosa que contiene un poco de peróxido de hidrógeno (H 2 O 2 ). "

Dr. Oliver G. Schmidt mientras realizaba su investigación. Crédito:Jacob Müller.
Como resultado de la estrategia de diseño no convencional utilizada por Schmidt y sus colegas, cuando el sistema microrobótico se coloca en una solución acuosa que contiene peróxido de hidrógeno (H 2 O 2 ) la solución entra en sus dos microtubos, generando burbujas de oxígeno. Estas burbujas luego se empujan fuera de los extremos de los microtubos, acelerando el sistema mediante un mecanismo conocido como propulsión a chorro.
"Este principio de propulsión a chorro fue pionero en nuestro grupo hace 12 años, ", Dijo Schmidt. Sin embargo, nunca antes se había construido un motor de dos reactores como en nuestro trabajo actual ".
La reacción catalítica en el núcleo de la estrategia de propulsión a chorro de los investigadores se puede controlar cambiando la temperatura de los motores a reacción. Una temperatura alta da como resultado más burbujas y un empuje más fuerte; una temperatura baja en menos burbujas y un empuje más débil.
Schmidt y sus colegas controlan la temperatura de uno de los dos motores a reacción aplicando una corriente que pasa a través de un elemento resistivo, que está conectado al motor. Los cambios de temperatura aumentan la cantidad de burbujas generadas y el consiguiente empuje en uno de los motores a reacción, lo que a su vez permite que el sistema gire a la derecha oa la izquierda.
"Puede preguntarse cómo suministramos la corriente que calienta el elemento resistivo, ", Dijo Schmidt." Para este propósito, Integramos una pequeña antena en el microsistema que puede ser alimentada por energía inalámbrica desde el exterior (similar a la carga inductiva inalámbrica de su teléfono móvil). Entonces, la energía eléctrica está a bordo y se puede usar, lo cual es completamente nuevo para un microbot autopropulsado tan pequeño ".
El diminuto robot desarrollado por Schmidt y sus colegas también tiene un brazo pequeño, lo que le permite agarrar y soltar pequeños objetos en su entorno. Cuando cambia la temperatura del sistema, el pequeño brazo realiza diferentes acciones, agacharse para agarrar objetos (p. ej., micro-píldoras) o agacharse para liberarlas.
"Este brazo robótico integrado también es una característica completamente nueva para microsistemas autopropulsados, ", Dijo Schmidt." Finalmente, el microrobot puede tener un pequeño LED infrarrojo a bordo, que se puede encender mediante la energía transferida de forma inalámbrica. Este LED podría ser útil para rastrear el microbot dentro del cuerpo. Nunca antes se había mostrado encender y apagar pequeños LED en un microrobot móvil ".
El diminuto sistema robótico desarrollado por Schmidt y su equipo está hecho de un material muy flexible. Esto significa que se puede doblar o deformar sin romperse, por lo tanto, incluso podría pasar a través de capilares diminutos u otros canales pequeños en el cuerpo humano y continuar funcionando normalmente.
En el futuro, este nuevo sistema podría tener varias aplicaciones valiosas. Por ejemplo, podría completar tareas dentro del cuerpo humano que requieren un alto nivel de precisión, incluidos los procedimientos quirúrgicos o de diagnóstico.
"Hemos demostrado que la energía eléctrica se puede transferir de forma inalámbrica a sistemas microrobóticos ultrapequeños y que esta energía se puede utilizar para realizar tareas útiles:dirigir el microrobot de forma remota o encender y apagar un LED infrarrojo, ", Dijo Schmidt." El próximo paso será ejecutar el sistema en fluidos biológicos como la sangre. Para este propósito, los motores deben construirse de una manera ligeramente diferente ".
© 2020 Science X Network