Jugar Pong con el clásico videojuego SpaceBok. Para simular la gravedad extremadamente baja de los asteroides, el equipo de SpaceBok hizo uso del piso más plano de los Países Bajos:un piso de epoxi de 4,8 x 9 m alisado a una planitud general de 0,8 mm, llamado Banco de Robótica Orbital para Tecnología Integrada (ORBIT), parte del Laboratorio de Control y Navegación de Orientación y Robótica Orbital de la ESA. SpaceBok se colocó de lado, luego se adjunta a una plataforma flotante para reproducir las condiciones de gravedad cero en dos dimensiones. Al saltar de una pared, su rueda de reacción le permitió girar en medio del salto, dejándolo aterrizar con los pies primero nuevamente en el otro lado de la cámara, como si estuviera saltando a lo largo de una única superficie reducida de baja gravedad. Crédito:ETH Zurich / ZHAW Zurich
Los astronautas en la Luna se encontraron saltando, en lugar de simplemente caminar. El robot de exploración planetaria SpaceBok de Suiza ha seguido su ejemplo, despegando las cuatro patas del suelo durante las pruebas en el corazón técnico de la ESA.
SpaceBok es un robot cuadrúpedo diseñado y construido por un equipo de estudiantes suizos de ETH Zurich y ZHAW Zurich. Actualmente se está probando utilizando instalaciones robóticas en el centro técnico ESTEC de la ESA en los Países Bajos.
El trabajo avanza bajo la dirección de Ph.D. estudiante Hendrik Kolvenbach del Laboratorio de Sistemas Robóticos de ETH Zurich, actualmente basado en ESTEC. El robot se está utilizando para investigar el potencial de la "marcha dinámica" para moverse en entornos de baja gravedad.
Hendrik explica:"En lugar de caminar estático, donde al menos tres piernas permanezcan en el suelo en todo momento, La marcha dinámica permite andar con fases de vuelo completas durante las cuales todas las piernas se mantienen alejadas del suelo. Los animales hacen uso de pasos dinámicos debido a su eficiencia, pero hasta hace poco el poder computacional y los algoritmos requeridos para el control hicieron que fuera un desafío realizarlos en robots.
"Para los entornos de menor gravedad de la Luna, Marte o asteroides, saltar del suelo de esta manera resulta ser una forma muy eficaz de desplazarse ".
"Los astronautas que se mueven en la sexta parte de la gravedad de la Luna adoptaron el salto instintivamente. SpaceBok podría llegar a alcanzar los 2 m de altura en la gravedad lunar, aunque tal altura plantea nuevos desafíos. Una vez que despega del suelo, el robot de patas necesita estabilizarse para bajar de nuevo de forma segura; básicamente, se está comportando como una mini-nave espacial en este punto. "dice el miembro del equipo Alexander Dietsche.
"Así que lo que hemos hecho es aprovechar uno de los métodos que utiliza un satélite convencional para controlar su orientación, llamada rueda de reacción. Se puede acelerar y desacelerar para desencadenar una reacción igual y opuesta en el propio SpaceBok, "explica el miembro del equipo Philip Arm.
"Adicionalmente, Las piernas de SpaceBok incorporan resortes para almacenar energía durante el aterrizaje y liberarla en el despegue, reduciendo significativamente la energía necesaria para lograr esos saltos, "agrega otro miembro del equipo, Benjamin Sun.
El equipo está aumentando lentamente la altura de los saltos repetitivos del robot, hasta 1,3 metros en condiciones de gravedad lunar simuladas hasta ahora.
Se han creado plataformas de prueba para simular varios entornos de gravedad, imitando no solo las condiciones lunares, sino también la muy baja gravedad de los asteroides. Cuanto menor sea la gravedad, más larga puede ser la fase de vuelo para cada salto del robot, pero se necesita un control efectivo tanto para el despegue como para el aterrizaje.
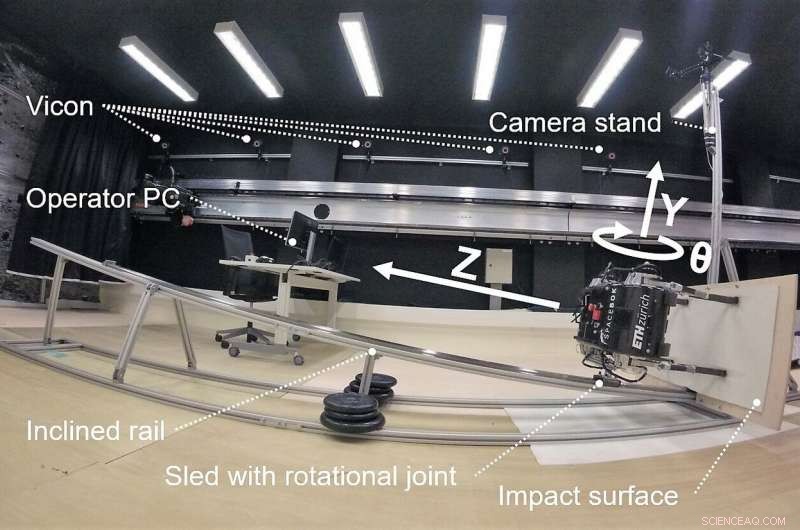
Los bancos de prueba para SpaceBok se han configurado para simular varios entornos de gravedad, imitando no solo las condiciones lunares, sino también la muy baja gravedad de los asteroides. Cuanto menor sea la gravedad, más larga puede ser la fase de vuelo para cada salto del robot, pero se necesita un control efectivo tanto para el despegue como para el aterrizaje. Crédito:ETH Zurich / ZHAW Zurich
SpaceBok es un robot cuadrúpedo diseñado y construido por un equipo de estudiantes suizos de ETH Zurich y ZHAW Zurich. Actualmente se está probando utilizando instalaciones robóticas en el centro técnico ESTEC de la ESA en los Países Bajos. El robot se está utilizando para investigar el potencial de la "marcha dinámica" para moverse en entornos de baja gravedad. Se han instalado plataformas de prueba para simular varios entornos de gravedad. SpaceBok podría alcanzar hasta 2 m de altura en gravedad lunar, aunque tal altura requiere que el robot se estabilice con una rueda de reacción que vuelva a bajar de forma segura. Crédito:ETH Zurich / ZHAW Zurich
SpaceBok montado lateralmente sobre una plataforma de aire flotante. Para simular la gravedad extremadamente baja de los asteroides, el equipo de SpaceBok hizo uso del piso más plano de los Países Bajos:un piso de epoxi de 4,8 x 9 m alisado a una planitud general de 0,8 mm, llamado Banco de Robótica Orbital para Tecnología Integrada (ORBIT), parte del Laboratorio de Control y Navegación de Orientación y Robótica Orbital de la ESA. SpaceBok se colocó de lado, luego se adjunta a una plataforma flotante para reproducir las condiciones de gravedad cero en dos dimensiones. Al saltar de una pared, su rueda de reacción le permitió girar en medio del salto, dejándolo aterrizar con los pies primero nuevamente en el otro lado de la cámara, como si estuviera saltando a lo largo de una única superficie reducida de baja gravedad. Crédito:ETH Zurich / ZHAW Zurich 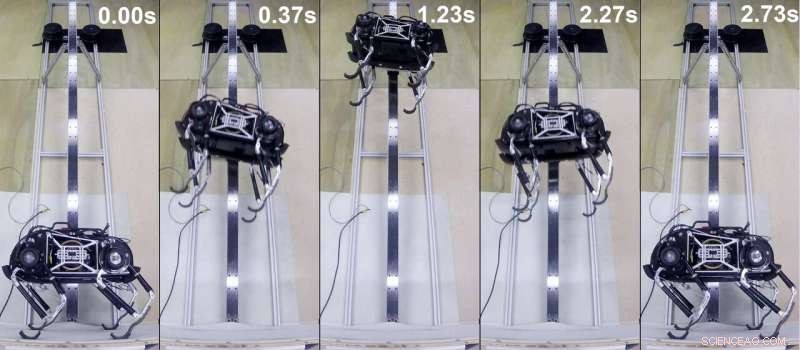
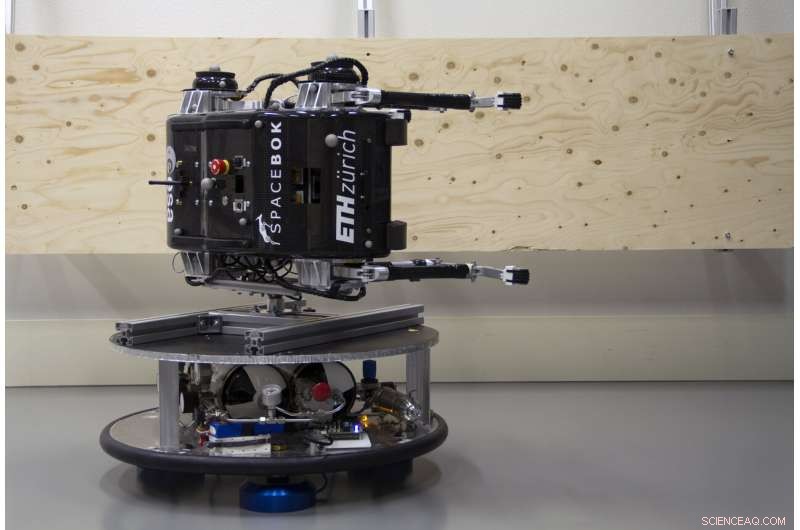
SpaceBok se colocó de lado, luego se adjunta a una plataforma flotante para reproducir las condiciones de gravedad cero en dos dimensiones. Al saltar de una pared, su rueda de reacción le permitió girar en medio del salto, dejándolo aterrizar con los pies primero en el otro lado de la cámara, como si estuviera saltando a lo largo de una única superficie de baja gravedad reducida.
Hendrik agregó:"Las pruebas fueron lo suficientemente bien que incluso usamos SpaceBok para jugar un juego de acción en vivo de Pong, el clásico de los videojuegos ".
Las pruebas continuarán en condiciones más realistas, con saltos sobre obstáculos, terreno montañoso, y suelo realista, eventualmente mudarse al exterior.
Hendrik está estudiando en ESTEC a través de la Networking Partnering Initiative de la ESA, destinado a aprovechar la investigación académica avanzada para aplicaciones espaciales.