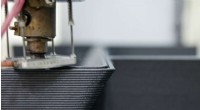
El paso de un objeto entre la mano humana y la mano del robot Crédito:© Scuola Superiore Sant'Anna
Hay un momento en el que la cooperación exitosa entre humanos y robots tiene una importancia decisiva:cuando uno debe entregar un objeto al otro, y por lo tanto, para coordinar sus acciones en consecuencia. Los investigadores están interesados en hacer que esta interacción sea más natural para los robots.
Un nuevo estudio titulado "Sobre la elección del tipo de agarre y la ubicación al entregar un objeto, " publicado en Ciencia Robótica por un equipo de investigación del Instituto de BioRobotics de la Scuola Superiore Sant'Anna y el Centro Australiano de Visión Robótica, revela los principios rectores que regulan la elección del tipo de prensión durante un intercambio de objetos, Fomentar la cooperación entre un sistema robótico y una persona.
El estudio, realizado en 2018, analizó el comportamiento de las personas al agarrar un objeto y entregárselo a un compañero. Los investigadores investigaron la elección de agarre y la colocación de la mano en esos objetos durante una entrega cuando el receptor realiza tareas posteriores. Los transeúntes tienden a agarrar la parte intencional de los objetos y dejan "asas" sin obstrucciones para los receptores. Intuitivamente, esta elección permite a los receptores realizar cómodamente las tareas posteriores con los objetos.
"Nos dimos cuenta de que, hasta la fecha, No se ha prestado suficiente atención a la forma en que un robot agarra un objeto en los estudios sobre la interacción humano-robot. "explica Francesca Cini, Doctor. estudiante de The BioRobotics Institute y uno de los dos autores principales del artículo. "Este aspecto es fundamental en este campo. Por ejemplo, cuando pasamos un destornillador sabiendo que el receptor debe usarlo, dejamos libre el asa para facilitar el agarre y el posterior uso del objeto. El objetivo de nuestra investigación es transferir todos estos principios rectores a un sistema robótico para que se utilicen para seleccionar un tipo de agarre correcto y facilitar el intercambio de objetos ".
El impacto del estudio colaborativo abre nuevos escenarios de innovación tecnológica, aportando beneficios a diversas actividades sociales en las que la cooperación humano-robot está bien establecida y aún no se ha establecido. Esto podría mejorar los pasos de producción en contextos industriales, y los robots podrían ayudar a los pacientes con resultados más naturales y efectivos en contextos de rehabilitación.
"La robótica colaborativa es la próxima frontera de la robótica industrial y asistida, "dice Marco Controzzi, investigador del Instituto BioRobotics e investigador principal del Laboratorio de Interacción Humano-Robot. "Por esta razón, necesitamos una nueva generación de robots diseñados para interactuar con los humanos de forma natural. Estos resultados nos permitirán instruir al robot para que manipule objetos como un colaborador humano mediante la introducción de reglas simples ".
"Quizás sorprendentemente, el agarre y la manipulación se consideran acciones muy intuitivas y directas para nosotros los humanos, "dice Valerio Ortenzi, investigador del Centro Australiano para la Visión Robótica y el otro autor principal del artículo. "Sin embargo, simplemente no lo son. Teníamos la intención de arrojar luz sobre el comportamiento de los humanos mientras interactuamos en una tarea de manipulación común, y un traspaso es un ejemplo perfecto en el que se realizan pequeños ajustes para lograr mejor el objetivo compartido de pasar de forma segura un objeto de una persona a otra ".