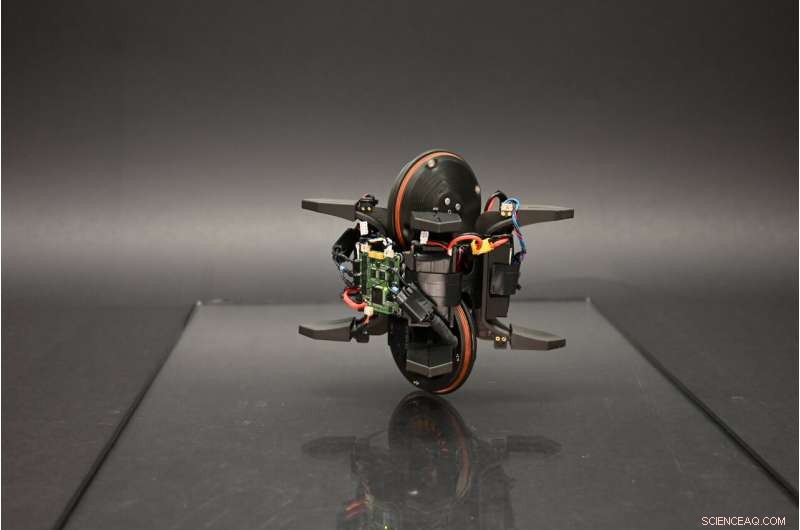
Crédito:Geist et al.
Investigadores de la Universidad RWTH de Aquisgrán en el equipo del Prof. Sebastian Trimpe y el Instituto Max Planck de Sistemas Inteligentes (MPI-IS) de Stuttgart han desarrollado recientemente el Wheelbot, un monociclo con rueda de reacción simétrica que puede saltar de forma autónoma sobre sus ruedas desde cualquier posición inicial. Este robot único, presentado en un artículo publicado en IEEE Robotics and Automation Letters se fabricó utilizando una combinación de componentes estándar e impresos en 3D.
"Nuestro grupo de investigación trabaja en la intersección entre la ciencia de datos y la ingeniería. Una dirección particular de nuestra investigación se centra en combinar los conocimientos de la teoría de control con el aprendizaje automático", dijo a Tech René Geist, miembro del equipo de Trimpe en Aquisgrán e investigador principal detrás de Wheelbot. Explorar "Los bancos de pruebas como péndulos, brazos robóticos y cuadricópteros nos ayudan a verificar si los supuestos teóricos que subyacen a un algoritmo son prácticos en la realidad. Idealmente, estos bancos de pruebas son fáciles de usar y difíciles de controlar con algoritmos de última generación. , obligándonos a pensar fuera de la caja".
Otros dos ejemplos de tales bancos de pruebas son el llamado "Cubo de Equilibrio" y su descendiente el "Cubli". Estos dos sistemas a menudo han ayudado a evaluar la efectividad de los sistemas de control de red y los métodos basados en datos para lograr un control no lineal.
El trabajo reciente de Trimpe, Geist y sus colegas se basa en estos esfuerzos previos en el campo. Su objetivo era desarrollar un robot monociclo minimalista que pudiera ser utilizado como banco de pruebas por especialistas en robótica e informáticos de todo el mundo. Para hacer esto, Trimpe y su grupo de investigación en la Universidad RWTH Aachen unieron fuerzas con Jonathan Fiene, jefe del laboratorio ZWE Robotics en el MPI-IS.
"Al principio del proyecto, optamos por usar motores sin escobillas, ya que ZWE Robotics tiene mucha experiencia en su uso en la iniciativa de robots dinámicos abiertos, mientras que los precios de los motores sin escobillas livianos cayeron debido a la adaptación generalizada de los cuadricópteros en el consumidor. mercado", explicó Geist. "Cuando observa un motor, podría decirse que el actuador más simple que se le ocurre es colocarle una rueda. Si esa rueda toca el suelo, la llamamos 'rueda rodante', si no lo hace, nos referimos a como una 'rueda de reacción'".
Equilibrar un robot no volador de un solo cuerpo con la capacidad de conducir y realizar maniobras generalmente requiere un mínimo de dos ruedas. Pueden ser ruedas giratorias, lo que da como resultado un robot similar a un Segway, o una sola rueda giratoria y una rueda de reacción, lo que da como resultado lo que se conoce como un robot monociclo de "rueda de reacción" o "intercambio de momentos".
Los robots monociclo que integran ruedas de reacción tienen diseños muy simples y pueden ser ensamblados fácilmente tanto por expertos en robótica como por estudiantes. A pesar de su sencillez, los monociclos con rueda de reacción son bastante difíciles de controlar. Esto los convierte en bancos de pruebas particularmente favorables para la investigación de redes de robots y métodos de control basados en el aprendizaje.
"Los robots de monociclo propuestos anteriormente están diseñados para equilibrarse únicamente en torno a su posición de equilibrio vertical, lo que limita considerablemente lo que se puede hacer con estos sistemas", dijo Geist. "Para maximizar la utilidad de un robot monociclo con rueda de reacción, decidimos que el Wheelbot debe poder recuperarse de perturbaciones bastante grandes, tiene una fuente de alimentación integrada para evitar que los cables limiten su maniobrabilidad y, además, debe poder erigirse por sí mismo después de derribando".
Al igual que las ruedas de los monociclos, el Wheelbot tiene una rueda giratoria que evita que se vuelque mientras se desplaza longitudinalmente. Sin embargo, a diferencia de los monociclos, el robot también integra una rueda de reacción que evita que se vuelque en la dirección lateral.
"Para comprender el funcionamiento interno de una rueda de reacción, puedes hacer un experimento simple en casa", dijo Geist. "Todo lo que necesita es una silla giratoria y un objeto moderadamente pesado, como un gato. Siéntese con las rodillas en la silla y estire los brazos mientras sostiene al gato, luego gire la parte superior del cuerpo en el sentido de las agujas del reloj. Mientras el gato sucumbe a su destino, notará que sus rodillas giran en sentido contrario a las agujas del reloj. En esta analogía, la parte superior de su cuerpo denota el rotor del motor, mientras que la parte inferior de su cuerpo denota el estator del motor".
Esencialmente, en las ruedas de reacción, cuando el rotor de un motor (unido a la rueda) gira en sentido horario, el estator del motor (unido al resto del Wheelbot) girará en sentido antihorario. Los robots que se equilibran utilizando una rueda de reacción difieren de los robots que recurren a giroscopios para equilibrarse. En un giroscopio, una rueda que gira rápidamente gira ortogonalmente en relación con su dirección de rotación creando pares de equilibrio debido a la conservación del momento angular.
En una rueda de reacción, estos efectos también ocurren, pero son minúsculos en comparación con los pares de reacción. Los pares de reacción se crean directamente dentro de la rueda y apuntan paralelos a la dirección de rotación de la rueda.
Crédito:Geist et al.
"Durante el automontaje, los pares de reacción deben girar el Wheelbot 90 grados", explicó Geist. "Durante la maniobra, el motor del Wheelbot consume 16 amperios a 24 voltios. Para un robot grande de 22 cm (8,7 pulgadas), los motores en realidad tienen un gran impacto, lo que nos obligó a usar un controlador de motor diseñado a medida, ya que los controladores de motor disponibles comercialmente eran o era demasiado grande o no podía manejar suficiente corriente al voltaje dado".
Con un consumo de corriente de 16 amperios, los investigadores encontraron que el motor que mueve el Wheelbot alcanzó su límite de velocidad en solo 0,25 segundos. Debido a esta limitación y otros desafíos que normalmente se encuentran al construir monociclos basados en ruedas de reacción, Geist y sus colegas decidieron idear un diseño completamente nuevo para su robot.
"Primero, decidimos que el robot debería ser simétrico, reduciendo efectivamente la cantidad de piezas diferentes que se necesitan imprimir y permitiendo que Wheelbot use cualquiera de sus ruedas como rueda rodante", dijo Geist. "La simetría tiene la ventaja adicional de que la rueda superior debe ser considerablemente más pequeña en comparación con los robots de monociclo existentes, lo que reduce su inercia rotacional en la dirección de guiñada. En segundo lugar, diseñamos las dimensiones del robot para minimizar el par requerido para la auto-erección".
En las pruebas iniciales, los investigadores encontraron que la versión estándar de su robot podía saltar sobre sus ruedas desde cualquier posición inicial en dos pasos. Esto permite que el robot desacelere su rueda de reacción antes de completar el segundo y último paso (es decir, empujarse hacia arriba). '
Además de crear un prototipo de su robot, Geist y sus colegas también crearon un estimador de estado personalizado, un algoritmo que puede estimar los ángulos de balanceo y cabeceo del robot. Este sistema deriva sus estimaciones de las mediciones de las cuatro unidades de medición inercial (IMU) del robot y los codificadores de rueda, que solo se basan en el conocimiento previo y disponible sobre el llamado modelo cinemático del robot (es decir, una descripción matemática de la posición del robot). centro de masa).
"Creemos que en el caso de los robots con ruedas (incluidos los Ballbots), el estimador propuesto forma una alternativa interesante a otros algoritmos de estimación como el filtrado de Kalman", dijo Geist. "El Wheelbot demuestra que una elección concisa de las dimensiones y el hardware de un robot monociclo de rueda de reacción produce un banco de pruebas versátil para el control de la robótica".

Crédito:Geist et al.
Geist y sus colegas fueron los primeros en crear un robot monociclo que puede saltar de manera eficiente sobre sus ruedas desde cualquier posición inicial. Su artículo es, por lo tanto, una importante contribución al campo de la robótica, ya que resuelve los desafíos electrónicos y mecánicos que normalmente se encuentran al crear este nuevo tipo de monociclos basados en ruedas de reacción.
"Además de ser un banco de pruebas desafiante para el control de robots, vemos un gran potencial para Wheelbot como una plataforma educativa que introduce a los estudiantes a la robótica", dijo Geist. "En este sentido, Wheelbot es un ejemplo típico para demostrar la naturaleza interdisciplinaria de la robótica. Además de su diseño mecánico que requiere modelar y simular la dinámica bastante interesante del robot, el consumo de alta corriente de sus motores plantea desafíos importantes en su diseño electrónico".
En el futuro, Wheelbot podría usarse tanto en entornos educativos como de investigación para probar redes de control robótico, algoritmos de aprendizaje automático y otros modelos. Una ventaja clave del robot es que su funcionamiento solo requiere un conocimiento básico de ingeniería de software, lo que lo convierte en una plataforma experimental ideal para estudiantes e ingenieros que dan sus primeros pasos en robótica.
Los investigadores del equipo de Trimpe ahora están trabajando en una nueva versión de su robot, llamada Wheelbot v3. Un objetivo central es hacer que el robot sea aún más accesible, para que sea más fácil de construir, usar y experimentar.
"La próxima versión de Wheelbot será un poco más pequeña que la versión actual, utiliza un microcontrolador más potente y, en términos de su diseño de firmware, es más fácil de operar", agregó Geist. "Además, actualmente estamos trabajando en un algoritmo de control que dirige el Wheelbot a lo largo de una ruta predefinida. Después de construir el primer robot monociclo con rueda de reacción de salto, estamos emocionados de demostrar que el Wheelbot también puede realizar maniobras de conducción ágiles".
© 2022 Red Ciencia X Un automóvil con ruedas, cuadrúpedo y robot humanoide:Swiss-Mile Robot de ETH Zurich