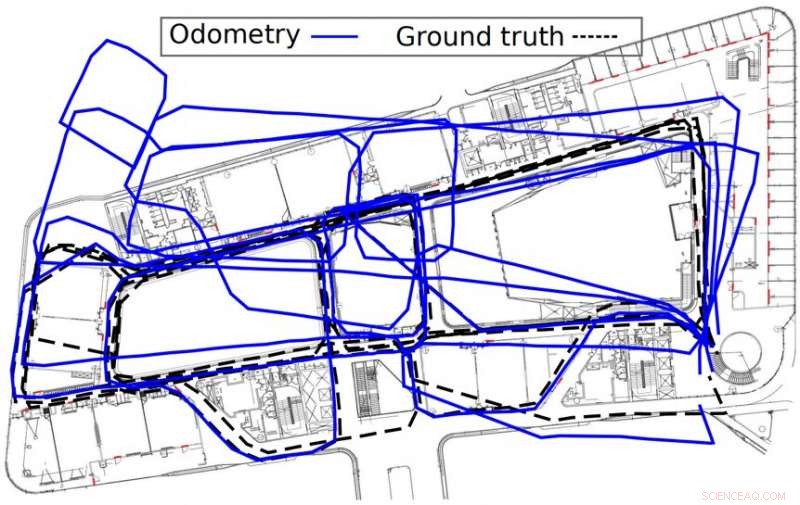
Figura que muestra cómo se comparan los enfoques de la verdad sobre el terreno con las técnicas de odometría. Crédito:Liu et al.
En años recientes, Los equipos de investigación de todo el mundo han desarrollado nuevos métodos para la localización y el mapeo simultáneos (SLAM). Estas técnicas se pueden utilizar para construir o actualizar mapas de un entorno determinado en tiempo real, mientras que simultáneamente rastrea la ubicación de un agente artificial o robot dentro de estos mapas.
La mayoría de los enfoques SLAM existentes se basan en gran medida en el uso de sensores basados en el alcance o en la visión, tanto para sentir el entorno como los movimientos de un robot. Estos sensores, sin embargo, puede ser muy costoso y, por lo general, requiere una potencia computacional significativa para funcionar correctamente.
Consciente de estas limitaciones, investigadores de la Universidad de Tecnología y Diseño de Singapur, Universidad de Ciencia y Tecnología del Suroeste, la Universidad de Moratuwa y la Universidad Tecnológica de Nanyang han desarrollado recientemente una nueva técnica para SLAM colaborativo que se basa en sensores basados en el alcance o en la visión. Esta tecnica, presentado en un artículo prepublicado en arXiv, podría permitir una navegación de robot más eficaz en entornos interiores desconocidos a un costo significativamente menor que el de la mayoría de los métodos propuestos anteriormente.
"Nuestro objetivo era utilizar un sensor computacional de bajo costo y bajo costo como reemplazo de los sensores basados en rango o visuales, "Chau Yuen, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Dado que los edificios modernos suelen tener cobertura de red Wi-Fi, nuestro objetivo es utilizar dicha información disponible gratuitamente para realizar SLAM ".
Para aprovechar las funciones de radio que están fácilmente disponibles en la mayoría de los entornos urbanos, Los investigadores desarrollaron un enfoque para la localización simultánea colaborativa y el mapeo de huellas dactilares de radio llamado C-SLAM-RF. Su técnica funciona mediante la detección de multitudes de mediciones de Wi-Fi en grandes entornos interiores y luego utiliza estas mediciones para generar mapas o localizar agentes artificiales.
"Nuestro objetivo es generar un mapa de radio del medio ambiente con el menor esfuerzo humano posible aprovechando las capacidades de detección integradas de los teléfonos inteligentes de uso común, "Explicó Yuen.
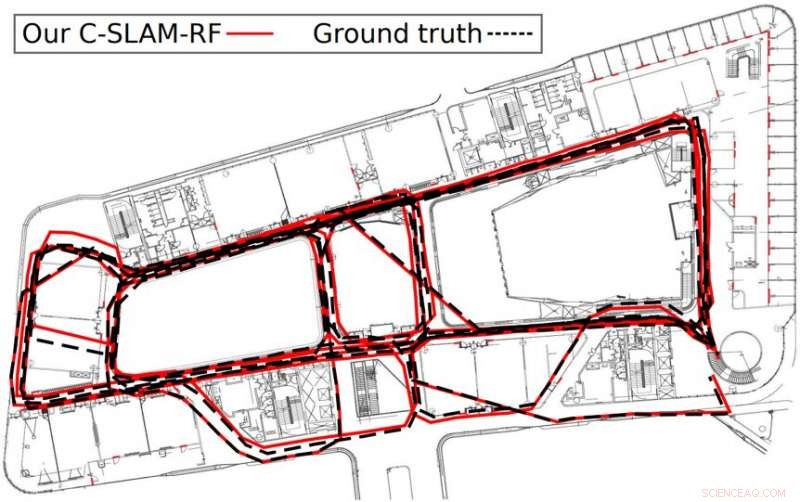
Figura que muestra cómo se comparan los enfoques de ruta estimada con la técnica SLAM desarrollada por los investigadores. Crédito:Liu et al.
El sistema desarrollado por Yuen y sus colegas recibe información sobre la intensidad de la señal proveniente de puntos de acceso Wi-Fi preexistentes distribuidos en un entorno determinado. así como de los procesos de navegación a estima (PDR) de peatones (es decir, cálculos de la posición actual de alguien) derivados de un teléfono inteligente. Luego utiliza estas señales para construir un mapa del entorno sin requerir conocimiento previo del entorno o la distribución de los puntos de acceso dentro de él. La herramienta C-SLAM-RF diseñada por los investigadores también puede determinar si el robot ha regresado a una ubicación visitada anteriormente. conocido como "cierre de bucle, "mediante la evaluación de la similitud entre las huellas dactilares de radio de diferentes señales.
"Los enfoques SLAM existentes suelen utilizar dispositivos dedicados, por ejemplo, cámaras visuales o sensores LIDAR basados en rango, para medir la similitud de las observaciones mediante la coincidencia de exploración o la coincidencia de características, que son computacionalmente costosos, "U-Xuan Tan, otro investigador involucrado en el estudio, dijo a TechXplore. "Nuestra solución aprovecha la posibilidad de realizar la localización y el mapeo con bajo costo, dispositivos IoT ubicuos como teléfonos inteligentes, debido a la creciente popularidad de las redes inalámbricas Wi-Fi ".
Yuen, Tan y sus colegas probaron su técnica en un ambiente interior con un área de 130 metros x 70 metros. Sus resultados fueron muy prometedores, dado que el rendimiento de su sistema superó el de varias otras técnicas existentes para SLAM, a menudo por un margen considerable.
"Evaluamos nuestro enfoque en un entorno a gran escala y se logra una precisión de posicionamiento de 0,6 metros sin ningún conocimiento previo del entorno, "Ran Liu, otro investigador involucrado en el estudio, dijo a TechXplore. "Esta precisión supera el enfoque de localización de última generación basado en huellas dactilares, lo que requiere un tedioso estudio del medio ambiente. El tiempo de cálculo requerido por nuestro enfoque es insignificante en comparación con el SLAM visual o basado en rangos ".
En el futuro, El enfoque de SLAM colaborativo ideado por este equipo de investigadores podría ayudar a mejorar la navegación de los robots en entornos desconocidos. Además, el hecho de que no requiera el uso de sensores costosos y dependa de puntos de acceso Wi-Fi existentes lo convierte en una solución más factible para implementaciones a gran escala.
"Ahora nos gustaría explorar la posibilidad de fusionar diferentes señales de radio, por ejemplo, señal celular, para mejorar la precisión de posicionamiento, "Yong Liang Guan, otro investigador involucrado en el estudio, dijo a TechXplor. "Otro plan es utilizar el mapa de radio producido con fines de localización. Una combinación con otros sensores, por ejemplo, telémetros láser para acelerar y mejorar el mapeo en entornos a gran escala, será también una de nuestras investigaciones futuras".
© 2020 Science X Network














