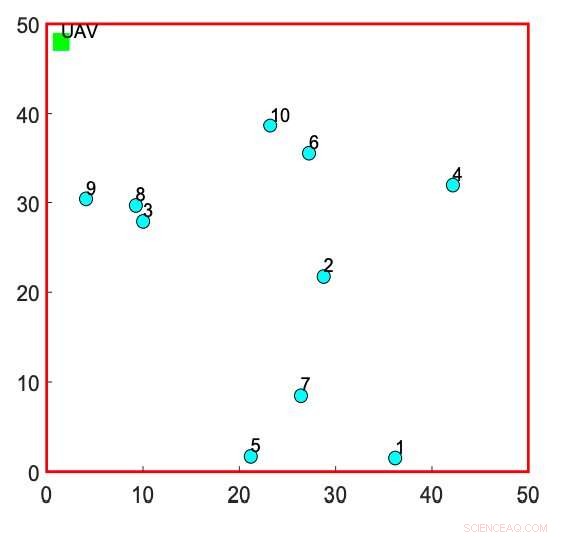
Imagen que muestra un sistema de coordenadas cartesiano bidimensional, donde el UAV está ubicado en la estación terrestre y las GU están ubicadas en el área considerada. Crédito:Tran et al.
Un equipo de investigadores de la Universidad de Luxemburgo y la Universidad Tecnológica de Ontario ha propuesto recientemente un nuevo enfoque para diseñar trayectorias para comunicaciones inalámbricas habilitadas para vehículos aéreos no tripulados (UAV) energéticamente eficientes. Su papel prepublicado en arXiv, se centra específicamente en los casos en los que un UAV actúa como una estación base voladora (BS) para servir a los usuarios terrestres (GS) dentro de algunas limitaciones de latencia predeterminadas.
"Nuestro objetivo es diseñar la trayectoria del UAV para minimizar el consumo total de energía mientras se satisfacen los requisitos de RT y el presupuesto de energía, que se logra mediante la optimización conjunta de la trayectoria y las velocidades del UAV a lo largo de los saltos posteriores, "escribieron los investigadores en su artículo.
Optimizar la trayectoria de un UAV y sus velocidades juntas puede ser algo difícil de lograr. Para hacerlo los investigadores desarrollaron un enfoque que lleva a cabo dos pasos consecutivos.
Su enfoque implica el uso de dos algoritmos distintos, una búsqueda heurística y un algoritmo de programación dinámica (DP). Los métodos de búsqueda heurística funcionan evaluando toda la información disponible en cada paso y decidiendo qué camino seguir según las opciones de clasificación disponibles.
Programación dinámica, por otra parte, es un enfoque para resolver problemas con "subproblemas superpuestos". Funciona abordando subproblemas individuales solo una vez y guardando los resultados de estos análisis, para volver a utilizarlos si se encuentra el mismo subproblema en el futuro.
Los investigadores utilizaron su búsqueda heurística y algoritmos de programación dinámica para lograr un conjunto factible de trayectorias para UAV que no violen las restricciones de latencia del usuario terrestre. La tarea de encontrar estas trayectorias se resuelve como si se tratara de un problema del llamado vendedor ambulante con ventanas de tiempo (TSPTW). TSPTW es un problema algorítmico utilizado en informática que implica encontrar una ruta de costo mínimo para un vendedor que quiere viajar y visitar cada una de un conjunto de ciudades exactamente una vez dentro de una ventana de tiempo específica.
Posteriormente se compararon las trayectorias sugeridas por los algoritmos con las obtenidas mediante técnicas de búsqueda exhaustiva y al abordar la tarea como el problema del viajante (TSP); un problema algorítmico en el que es necesario idear las rutas óptimas para un vendedor que desea visitar un conjunto específico de ciudades sin ningún requisito de tiempo específico.
"Si bien el algoritmo exhaustivo logra el mejor rendimiento a un alto costo de cálculo, el algoritmo heurístico presenta un rendimiento más pobre con baja complejidad, "explicaron los investigadores en su artículo." Como resultado, el DP se propone como un compromiso práctico entre los algoritmos exhaustivos y heurísticos ".
Además de los dos algoritmos para encontrar trayectorias óptimas de UAV, los investigadores también propusieron una técnica para minimizar la energía. Este método funciona optimizando conjuntamente las velocidades del UAV y los saltos posteriores.
Cuando los investigadores evaluaron sus algoritmos, encontraron que son altamente efectivos, superando las técnicas de vanguardia existentes tanto en términos de consumo de energía como de rendimiento de cortes. En el futuro, el nuevo enfoque que propusieron podría ayudar a diseñar mejores trayectorias para la minimización de energía en aplicaciones que involucran comunicaciones inalámbricas habilitadas por UAV con restricciones de latencia. Además, su trabajo podría allanar el camino para futuros estudios destinados a desarrollar nuevas herramientas para mejorar el rendimiento de las redes de comunicación de UAV.
© 2019 Science X Network