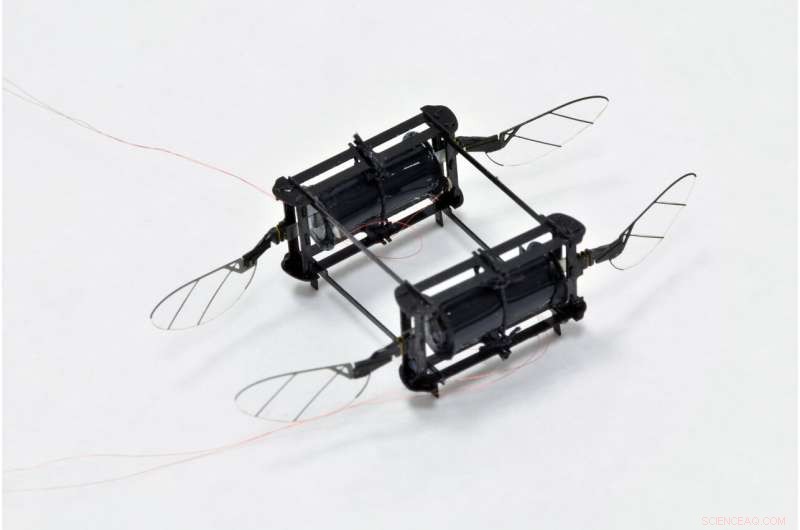
Un cuatro alas, El modelo de dos actuadores podría volar en un entorno desordenado, superando múltiples colisiones en un solo vuelo. Crédito:Laboratorio de microrrobótica de Harvard
La vista de un RoboBee precipitándose hacia una pared o chocando contra una caja de vidrio puede haber provocado una vez el pánico en los investigadores del Laboratorio de Microrobótica de Harvard en la Escuela de Ingeniería y Ciencias Aplicadas de Harvard John A. Paulson (SEAS). pero no más.
Investigadores de SEAS y el Instituto Wyss de Ingeniería de Inspiración Biológica han desarrollado un robusto RoboBee impulsado por suaves músculos artificiales que pueden chocar contra las paredes. caer al suelo, y chocar con otros RoboBees sin sufrir daños. Es el primer microrobot impulsado por actuadores suaves para lograr un vuelo controlado.
"Ha habido un gran impulso en el campo de la microrrobótica para hacer robots móviles con actuadores suaves porque son muy resistentes, "dijo Yufeng Chen, ex estudiante de posgrado y becario postdoctoral en SEAS y primer autor del artículo. "Sin embargo, muchas personas en el campo se han mostrado escépticas de que pudieran usarse para robots voladores porque la densidad de potencia de esos actuadores simplemente no ha sido lo suficientemente alta y son notoriamente difíciles de controlar. Nuestro actuador tiene una densidad de potencia y capacidad de control lo suficientemente altas como para lograr un vuelo estacionario ".
La investigación se publica en Naturaleza .
Para resolver el problema de la densidad de potencia, los investigadores se basaron en los actuadores suaves impulsados eléctricamente desarrollados en el laboratorio de David Clarke, el Profesor de Materiales de la Familia Extendida Tarr. Estos actuadores blandos se fabrican con elastómeros dieléctricos, materiales blandos con buenas propiedades aislantes, que se deforman cuando se aplica un campo eléctrico.
Al mejorar la conductividad del electrodo, los investigadores pudieron operar el actuador a 500 Hertz, a la par con los actuadores rígidos utilizados anteriormente en robots similares.
Otro desafío cuando se trata de actuadores blandos es que el sistema tiende a deformarse y volverse inestable. Para resolver este desafío, los investigadores construyeron un fuselaje liviano con un trozo de rosca de restricción vertical para evitar que el actuador se pandeara.
Los actuadores blandos se pueden ensamblar y reemplazar fácilmente en estos robots a pequeña escala. Para demostrar varias capacidades de vuelo, los investigadores construyeron varios modelos diferentes del RoboBee de potencia suave. Un modelo de dos alas podía despegar del suelo pero no tenía ningún control adicional. Un cuatro alas, El modelo de dos actuadores podría volar en un entorno desordenado, superando múltiples colisiones en un solo vuelo.
"Una ventaja de la pequeña escala, robots de baja masa es su resistencia a los impactos externos, "dijo Elizabeth Farrell Helbling, ex estudiante de posgrado en SEAS y coautor del artículo. "El actuador suave proporciona un beneficio adicional porque puede absorber el impacto mejor que las estrategias de actuación tradicionales. Esto sería útil en aplicaciones potenciales como volar entre escombros para misiones de búsqueda y rescate".
Un ocho alas, modelo de cuatro actuadores demostró vuelo estacionario controlado, el primero para un microrobot volador de propulsión suave.
Próximo, los investigadores tienen como objetivo aumentar la eficiencia del robot de potencia suave, que todavía está muy por detrás de los robots voladores más tradicionales.
"Los actuadores suaves con propiedades musculares y activación eléctrica representan un gran desafío en robótica, "dice Robert Wood, Profesor Charles River de Ingeniería y Ciencias Aplicadas en SEAS, miembro principal de la facultad del Instituto Wyss de Ingeniería de Inspiración Biológica y autor principal del artículo. "Si pudiéramos diseñar músculos artificiales de alto rendimiento, el cielo es el límite de los robots que podríamos construir ".