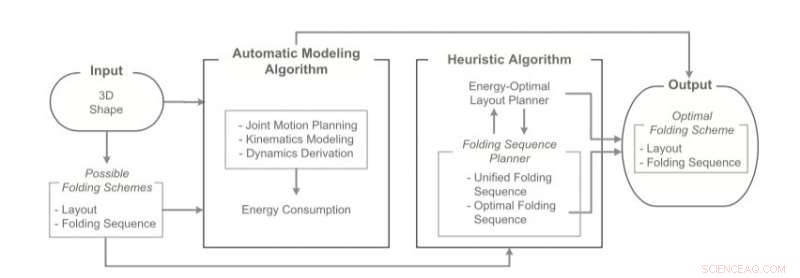
Descripción general de la planificación de reconfiguración de energía óptima para robots modulares utilizando dos enfoques, un algoritmo de modelado automático y un algoritmo heurístico. Crédito:Yao et al.
Investigadores del Laboratorio de Robótica Reconfigurable (RRL) de la École Polytechnique Fédèrale de Lausanne (EPFL) han desarrollado recientemente un nuevo enfoque para la reconfiguración de robots modulares que se inspira en el arte del origami. Este método, esbozado en un artículo publicado en Sage's Revista internacional de investigación robótica , elimina los cambios de conectividad durante la transformación de un sistema.
Los robots reconfigurables modulares son sistemas versátiles que pueden transformar su forma para realizar diferentes tareas en una variedad de entornos. Esto puede ser particularmente útil en entornos basados en misiones, como el espacio, reconocimiento, muestreo, u operaciones de búsqueda y salvamento. En estos casos, Los robots convencionales de morfología fija podrían tener dificultades para adaptarse a entornos complejos e inciertos. mientras que los sistemas robóticos modulares pueden reconfigurarse y adaptarse de forma autónoma a nuevas circunstancias.
La reconfigurabilidad de los sistemas modulares se logra cambiando la morfología de su estructura general, así como conectando y desconectando sus módulos. A pesar de las notables ventajas de utilizar estos sistemas, la gran cantidad de componentes individuales y grados de libertad (DoF) involucrados hacen que cambiar su configuración sea un gran desafío.
Para planificar y optimizar este proceso, estudios anteriores han propuesto una variedad de enfoques, que se puede dividir en dos categorías principales. La primera categoría implica la configuración de destino al dividir la arquitectura modular del sistema en diferentes conjuntos de módulos, que puede simplificar el proceso de reconfiguración. Estos enfoques pueden facilitar el diseño de la configuración final para tareas específicas, sin embargo, no logran abordar el proceso de reconfiguración dinámica.
Otro enfoque para optimizar la reconfiguración es minimizar el número de cambios de conectividad cuando el sistema se está transformando en la forma deseada. Aunque estos planificadores de reconfiguración tienen como objetivo reducir el número de cambios de conectividad, todavía requieren algún tipo de desconexión y conexión entre módulos en el proceso. Estos cambios de conectividad requieren mucho tiempo, puede causar complicaciones en la transformación general y puede resultar en desalineación, conduciendo al fallo mecánico del sistema.
Abordar las limitaciones de los enfoques existentes, el equipo de investigadores de RRL introdujo una nueva estrategia para planificar la reconfiguración de sistemas robóticos modulares, que se basa en el proceso de plegado de origami. Origami es el arte tradicional japonés de doblar hojas planas de papel en una variedad de objetos o formas tridimensionales.
"Nuestro método consiste en un planificador de reconfiguración de energía óptima que genera un patrón de ensamblaje 2-D inicial y una secuencia de actuación de las unidades modulares, ambos resultan en un consumo mínimo de energía, "escribieron los investigadores en su artículo.
El marco algorítmico ideado por los investigadores incluye dos componentes principales:un algoritmo de modelado automático y un algoritmo heurístico. El algoritmo de modelado automático genera el modelo cinemático y la derivación dinámica de agregados robóticos, calcular el consumo de torque de los patrones de pre-plegado para secuencias de plegado predefinidas y usar la planificación del movimiento para considerar el espesor de la estructura. El algoritmo heurístico, por otra parte, incluye un planificador de diseño 2-D óptimo seguido de dos planificadores de secuencia de plegado:un planificador de actuación unificado para diferentes diseños y un planificador óptimo dentro de un diseño específico.
El nuevo enfoque ideado en RRL aborda eficazmente el problema NP-completo de la planificación de la reconfiguración de energía óptima en robots modulares, generar esquemas de reconfiguración de energía óptima para el ensamblaje inicial y la secuencia de plegado de los módulos del sistema. Los investigadores evaluaron su estrategia utilizando simulaciones en Mori, una plataforma robótica modular, y obtuvo resultados muy prometedores.
"Demostramos la eficacia de nuestro método aplicando los algoritmos a Mori, un robot modular de origami, en simulación, "escribieron los investigadores en su artículo." Nuestros resultados muestran que el algoritmo heurístico produce esquemas de reconfiguración con alta calidad, en comparación con el algoritmo de modelado automático, simultáneamente ahorrando una cantidad considerable de tiempo y esfuerzo computacional ".
© 2018 Science X Network