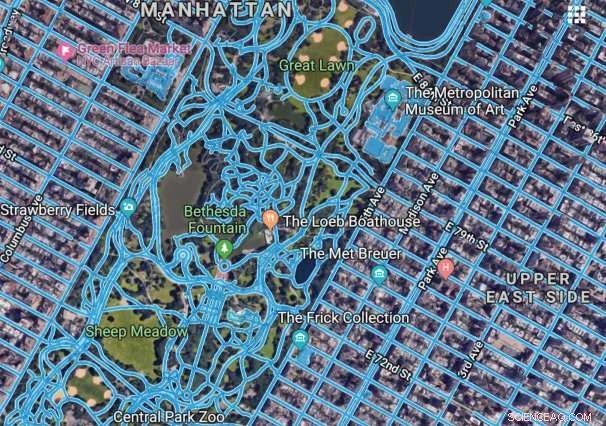
Para crear mapas de carreteras completos, las empresas como Google a menudo tienen que hacer que los empleados tomen imágenes aéreas existentes con información incompleta y llenen los huecos manualmente. Crédito:Instituto de Tecnología de Massachusetts
Las aplicaciones de mapas pueden haber cambiado nuestro mundo, pero todavía no lo han mapeado todo. Específicamente, mapear carreteras puede ser difícil y tedioso:incluso después de tomar imágenes aéreas, las empresas todavía tienen que pasar muchas horas trazando carreteras manualmente. Como resultado, incluso empresas como Google aún no han logrado mapear la gran mayoría de los más de 20 millones de millas de carreteras en todo el mundo.
Los huecos en los mapas son un problema, en particular para los sistemas que se están desarrollando para vehículos autónomos. Para abordar la cuestión, investigadores del Laboratorio de Ciencias de la Computación e Inteligencia Artificial del MIT (CSAIL) han creado RoadTracer, un método automatizado para crear mapas de carreteras que es un 45 por ciento más preciso que los enfoques existentes.
Usando datos de imágenes aéreas, el equipo dice que RoadTracer no solo es más preciso, pero más rentable que los enfoques actuales. El profesor del MIT Mohammad Alizadeh dice que este trabajo será útil tanto para gigantes tecnológicos como Google como para organizaciones más pequeñas sin los recursos para curar y corregir grandes cantidades de errores en mapas.
"RoadTracer es ideal para cartografiar áreas del mundo donde los mapas suelen estar desactualizados, que incluye tanto lugares con menor población como áreas donde hay construcciones frecuentes, "dice Alizadeh, uno de los coautores de un nuevo artículo sobre el sistema. "Por ejemplo, A los mapas existentes para áreas remotas como la Tailandia rural les faltan muchas carreteras. RoadTracer podría ayudar a que sean más precisos ".
Por ejemplo, mirando imágenes aéreas de la ciudad de Nueva York, RoadTracer pudo mapear correctamente el 44 por ciento de sus cruces de carreteras, que es más del doble de efectivo que los enfoques tradicionales basados en la segmentación de imágenes que solo podían mapear el 19 por ciento.
El papel, que se presentará en junio en la Conferencia sobre Visión por Computador y Reconocimiento de Patrones (CVPR) en Salt Lake City, Utah, es una colaboración entre CSAIL y el Qatar Computing Research Institute (QCRI).
Los coautores del MIT de Alizadeh incluyen a los estudiantes graduados Fayven Bastani y Songtao He, y profesores Hari Balakrishnan, Sam Madden, y David DeWitt. Los coautores de QCRI incluyen a la ingeniera de software senior Sofiane Abbar y Sanjay Chawla, quien es el director de investigación del Grupo de Análisis de Datos de QCRI.
Los esfuerzos actuales para automatizar mapas implican entrenar redes neuronales para mirar imágenes aéreas e identificar píxeles individuales como "camino" o "no camino". Dado que las imágenes aéreas a menudo pueden ser ambiguas e incompletas, Dichos sistemas también requieren un paso de posprocesamiento que tiene como objetivo tratar de llenar algunos de los vacíos.
Desafortunadamente, Estos métodos de "segmentación" suelen ser imprecisos:si el modelo etiqueta incorrectamente un píxel, ese error se ampliará en la hoja de ruta final. Los errores son particularmente probables si las imágenes aéreas tienen árboles, edificios o sombras que oscurecen dónde comienzan y terminan los caminos. (El paso de posprocesamiento también requiere tomar decisiones basadas en suposiciones que pueden no siempre ser válidas, como conectar dos tramos de carretera simplemente porque están uno al lado del otro).
Mientras tanto, RoadTracer crea mapas paso a paso. Comienza en una ubicación conocida de la red de carreteras, y utiliza una red neuronal para examinar el área circundante y determinar qué punto es más probable que sea la siguiente parte del camino. Luego agrega ese punto y repite el proceso para trazar gradualmente la red de carreteras paso a paso.
"En lugar de tomar miles de decisiones diferentes a la vez sobre si varios píxeles representan partes de una carretera, RoadTracer se centra en el problema más simple de averiguar qué dirección seguir cuando partimos de un lugar en particular que sabemos que es una carretera. ", dice Bastani." En muchos sentidos, esto está mucho más cerca de cómo nosotros, como seres humanos, construimos modelos mentales del mundo que nos rodea ".
El equipo capacitó a RoadTracer en imágenes aéreas de 25 ciudades en seis países de América del Norte y Europa, y luego evaluó sus habilidades de mapeo en otras 15 ciudades.
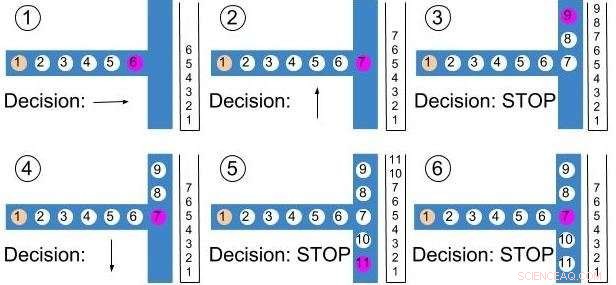
Para crear una hoja de ruta, el sistema comienza en una ubicación conocida y utiliza una red neuronal para examinar el área circundante y determinar qué punto es más probable que sea la siguiente parte de la carretera. Luego agrega ese punto y repite el proceso para trazar gradualmente el camino paso a paso. Crédito:Instituto de Tecnología de Massachusetts
"Es importante que un sistema de mapeo pueda funcionar bien en ciudades en las que no se ha capacitado, porque las regiones donde el mapeo automático es más prometedor son aquellas donde los mapas existentes no existen o son inexactos, "dice Balakrishnan.
Bastani dice que el hecho de que RoadTracer tuviera una tasa de error un 45 por ciento más baja es esencial para hacer que los sistemas de mapeo automático sean más prácticos para empresas como Google.
"Si la tasa de error es demasiado alta, entonces es más eficiente mapear las carreteras manualmente desde cero en lugar de eliminar segmentos incorrectos del mapa inferido, "dice Bastani.
Todavía, implementar algo como RoadTracer no sacaría a la gente completamente del circuito:el equipo dice que podrían imaginar el sistema proponiendo mapas de ruta para una región grande y luego que un experto humano viniera a verificar el diseño.
"Dicho eso, lo que está claro es que con un sistema como el nuestro podría disminuir drásticamente la cantidad de trabajo tedioso que los humanos tendrían que hacer, "Dice Alizadeh.
En efecto, una ventaja del enfoque incremental de RoadTracer es que facilita mucho la corrección de errores; los supervisores humanos pueden simplemente corregirlos y volver a ejecutar el algoritmo desde donde lo dejaron, en lugar de seguir utilizando información imprecisa que se filtra a otras partes del mapa.
Por supuesto, Las imágenes aéreas son solo una pieza del rompecabezas. No le dan información sobre carreteras que tienen pasos superiores y inferiores, ya que son imposibles de determinar desde arriba. Como resultado, el equipo también está desarrollando algoritmos por separado que pueden crear mapas a partir de datos GPS, y trabajar para fusionar estos enfoques en un solo sistema de mapeo.
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.