Crédito:Universidad de Bristol
En un nuevo giro en la investigación entre humanos y robots, Los informáticos de la Universidad de Bristol han desarrollado un robot de mano que primero predice y luego frustra a los usuarios al rebelarse contra sus planes. demostrando así una comprensión de la intención humana.
En un mundo cada vez más tecnológico, la cooperación entre humanos y máquinas es un aspecto esencial de la automatización. Esta nueva investigación muestra que frustrar a las personas a propósito es parte del proceso de desarrollo de robots que cooperen mejor con los usuarios.
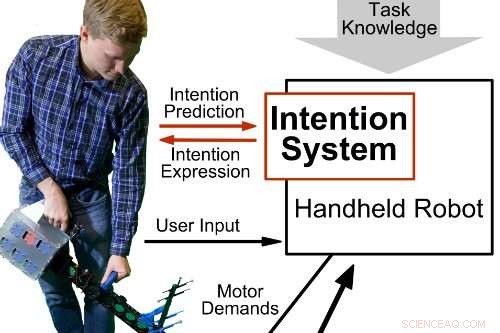
El equipo de Bristol ha desarrollado Robots de mano que completan tareas en colaboración con el usuario. A diferencia de las herramientas eléctricas convencionales, que no saben nada sobre las tareas que realizan y están totalmente bajo el control de los usuarios, el robot de mano tiene conocimientos sobre la tarea y puede ayudar a través de la orientación, movimientos precisos y decisiones sobre secuencias de tareas.
Si bien esto ayuda a realizar las tareas más rápido y con mayor precisión, los usuarios pueden irritarse cuando las decisiones del robot no se ajustan a sus propios planes.
Últimas investigaciones realizadas en este espacio por Ph.D. la candidata Janis Stolzenwald y el profesor Walterio Mayol-Cuevas, del Departamento de Ciencias de la Computación de la Universidad de Bristol, explora el uso de herramientas inteligentes que pueden sesgar sus decisiones en respuesta a la intención de los usuarios.
Esta investigación es un giro nuevo e interesante en la investigación entre humanos y robots, ya que tiene como objetivo predecir primero lo que quieren los usuarios y luego ir en contra de estos planes.
El profesor Mayol-Cuevas dijo:"Si está frustrado con una máquina que está destinada a ayudarlo, esto es más fácil de identificar y medir que las señales a menudo esquivas de la cooperación humano-robot. Si el usuario se siente frustrado cuando le indicamos al robot que se rebele contra sus planes, sabemos que el robot entendió lo que quería hacer ".
"Así como las predicciones a corto plazo de las acciones de los demás son esenciales para el éxito del trabajo en equipo humano, nuestra investigación muestra que la integración de esta capacidad en sistemas robóticos cooperativos es esencial para una cooperación hombre-máquina exitosa ".
Para el estudio, Los investigadores utilizaron un prototipo que puede rastrear la mirada del usuario y derivar predicciones a corto plazo sobre las acciones previstas a través del aprendizaje automático. Este conocimiento se utiliza luego como base para las decisiones del robot, como hacia dónde moverse a continuación.
El equipo de Bristol entrenó al robot en el estudio utilizando un conjunto de más de 900 ejemplos de entrenamiento de una tarea de selección y colocación realizada por los participantes.
El núcleo de esta investigación es la evaluación del modelo de predicción de intención. Los investigadores probaron el robot en dos casos:obediencia y rebelión. El robot estaba programado para seguir o desobedecer la intención prevista del usuario. Conocer los objetivos del usuario le dio al robot el poder de rebelarse contra sus decisiones. La diferencia en las respuestas de frustración entre las dos condiciones sirvió como evidencia de la precisión de las predicciones del robot. validando así el modelo de predicción de intención.
Janis Stolzenwald, un doctorado estudiante patrocinado por la Fundación Alemana de Becas Académicas y el EPSRC del Reino Unido, llevó a cabo los experimentos de los usuarios e identificó nuevos desafíos para el futuro. Dijo:"Descubrimos que el modelo de intención es más efectivo cuando los datos de la mirada se combinan con el conocimiento de la tarea. Esto plantea una nueva pregunta de investigación:¿cómo puede el robot recuperar este conocimiento? tarea."
En preparación para este nuevo desafío, los investigadores están explorando actualmente el control compartido, interacción y nuevas aplicaciones dentro de sus estudios sobre colaboración remota a través del robot de mano. Una tarea de mantenimiento sirve como un experimento de usuario, donde un usuario de robot de mano recibe asistencia a través de un experto que controla el robot de forma remota.
La investigación se basa en el robot de mano diseñado y construido por el ex Ph.D. estudiante Austin Gregg-Smith, y que está disponible como diseño de código abierto a través del sitio del investigador en www.handheldrobotics.org.