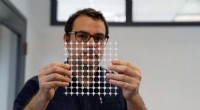
Una pinza robótica desarrollada en el laboratorio de la Universidad de Buffalo, el ingeniero Ehsan Esfahani, utiliza la repulsión entre imanes para ajustar la rigidez de su agarre. mejorar la seguridad. Crédito:Douglas Levere / Universidad de Buffalo
Las manos humanas son muy hábiles para manipular una variedad de objetos. Podemos coger un huevo o una fresa sin romperlo. Podemos clavar un clavo.
Una característica que nos permite realizar una variedad de tareas es la capacidad de alterar la firmeza de nuestro agarre, y los ingenieros de la Universidad de Buffalo han desarrollado una mano robótica de dos dedos que comparte este rasgo.
El diseño de la mano robótica le permite absorber energía de los impactos durante las colisiones. Esto evita que lo que el robot sostiene se rompa, y también hace que sea más seguro para las personas trabajar con las máquinas y cerca de ellas.
Tales pinzas serían un activo valioso para la asociación entre humanos y robots en las líneas de ensamblaje en la industria automotriz, embalaje electrónico y otras industrias, dice Ehsan Esfahani, Doctor., profesor asociado de ingeniería mecánica y aeroespacial en la Facultad de Ingeniería y Ciencias Aplicadas de la UB.
"Nuestra pinza robótica imita la capacidad de la mano humana para ajustar la rigidez del agarre. Estas pinzas están diseñadas para robots colaborativos que trabajan junto con personas, "Dice Esfahani." Van a ser ayudantes, por lo que necesitan estar a salvo, y las pinzas de rigidez variable ayudan a lograr ese objetivo ".
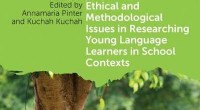
Un nuevo estudio publicado en línea el 10 de septiembre en Transacciones IEEE sobre electrónica industrial destaca el diseño seguro del dispositivo, incluso a través de experimentos que muestran cómo las características de absorción de impactos de la pinza evitan que un palito de espagueti se rompa durante una colisión.
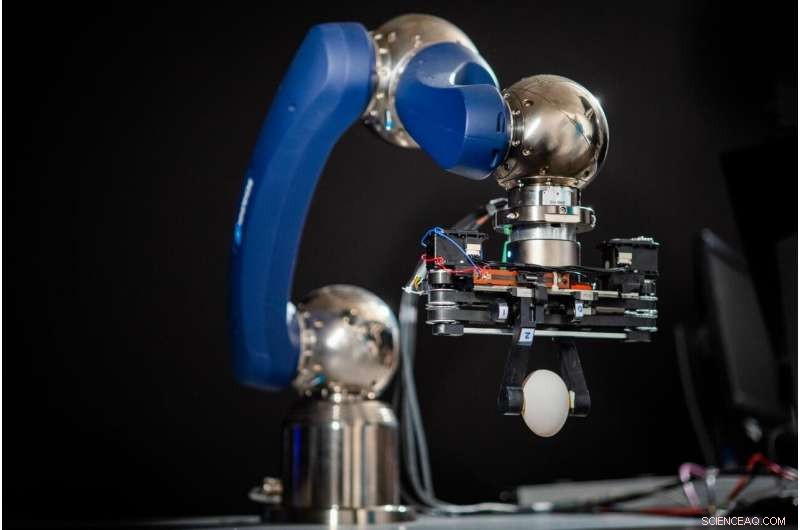
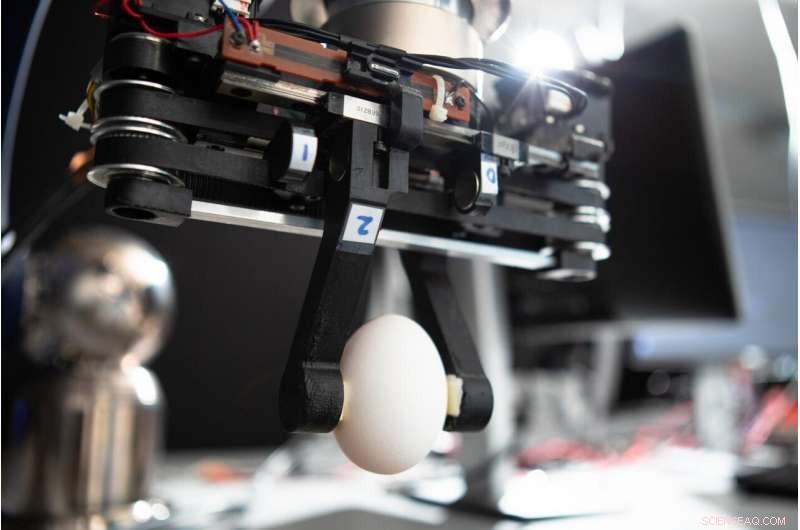
Una pinza robótica desarrollada en el laboratorio del ingeniero Ehsan Esfahani de la Universidad de Buffalo. La pinza está unida a un brazo robótico disponible comercialmente. Crédito:Douglas Levere / Universidad de Buffalo
Los imanes le dan a este robot un toque suave
Esfahani explica que los imanes son el secreto detrás de la versatilidad de la pinza robótica.
En lugar de tener dos dedos fijos en su lugar, cada uno de los dedos de la pinza tiene una base magnética que se asienta entre dos imanes de neodimio que repelen, o empujar en contra, el dedo.
El espacio de aire entre los imanes actúa como un resorte, creando un poco de elasticidad cuando la mano levanta un objeto o choca con una fuerza externa. La rigidez del agarre también se puede ajustar aumentando o disminuyendo el espacio entre los imanes.
En el nuevo periódico, Esfahani y Amirhossein Memar, un ex Ph.D. de la UB candidato en ingeniería mecánica y aeroespacial, informe sobre estas características de seguridad.
En un conjunto de pruebas, los ingenieros colocaron una barra corta de espagueti a lo largo entre los dedos de la mano robótica. Cuando la pinza choca contra un objeto fijo, el dispositivo detectó la aplicación de la fuerza externa, lo que provocó que los imanes ajustaran su posición, reduciendo temporalmente la rigidez del agarre y permitiendo que la pinza absorba parte de la energía de la colisión.
¿El final resulto? El palito de espagueti se quedó en una sola pieza.
Próximos pasos en el desarrollo
Esfahani señala que la pinza que está desarrollando su equipo se puede acoplar a brazos robóticos disponibles comercialmente que ya se utilizan en muchas instalaciones. Esto podría reducir el costo de adaptar la tecnología para las empresas interesadas en mejorar la seguridad y las capacidades de las máquinas existentes.
Esfahani está lanzando una nueva empresa para comercializar la pinza, licenciamiento de tecnología de UB.
Su equipo ha recibido $ 55, 000 del Buffalo Fund:Accelerator, financiado por Innovation Hub, que es administrado por UB y respaldado por Empire State Development, para desarrollar aún más la mano robótica. Además de perfeccionar el diseño actual de la pinza, el equipo también puede explorar avances como agregar un tercer dedo.
Los investigadores que han participado en el diseño y prueba de la pinza incluyen Ph.D. estudiante Sri Sadhan Jujjavarapu y Memar, el coautor del nuevo estudio sobre palitos de espagueti, quien ha recibido su Ph.D. de la UB y ahora es investigadora científica postdoctoral en Facebook Reality Labs.