El robot utilizado en este experimento fue una máquina de la marca Minitaur con patas. Crédito:Georgia Tech / Neveln
Ew, ¡una cucaracha! Pero se cierra antes de que aparezca el matamoscas. Ahora, Los investigadores han aprovechado las magníficas habilidades de escurrimiento del insecto para crear un método ingeniosamente simple para evaluar y mejorar la locomoción en los robots.
Normalmente, tedioso modelado de la mecánica, electrónica, y la ciencia de la información es necesaria para comprender cómo las partes móviles de los insectos o robots se coordinan sin problemas para llevarlos a lugares. Pero en un nuevo estudio, Los investigadores de biomecánica del Instituto de Tecnología de Georgia redujeron las carreras de las cucarachas a prácticos principios y ecuaciones que luego usaron para hacer que un robot de prueba deambulara mejor.
El método les dijo a los investigadores cómo funciona cada pierna por sí sola, cómo se unen todos como un todo, y la armonía o falta de ella en cómo lo hacen. A pesar de las dinámicas de movimiento totalmente divergentes de los bichos y los robots, el nuevo método funcionó para ambos y debería funcionar para otros robots y animales, también.
El robot biológico la cucaracha, era el corredor muy superior con señales neurológicas que guían seis piernas impecablemente evolucionadas. El robot mecánico un modelo de consumidor, tenía cuatro patas rechonchas y no tenía sistema nervioso, pero para el control de la locomoción dependía, en cambio, de fuerzas físicas burdas que viajaban a través de su chasis como señales toscas para coordinar aproximadamente su andar torpe.
"El robot era mucho más voluminoso y apenas podía sentir su entorno. La cucaracha tenía muchos sentidos y puede adaptarse mejor al terreno accidentado. Los golpes tan altos como sus caderas no la ralentizarían en absoluto, "dijo Izaak Neveln, el primer autor del estudio, quien fue investigador postdoctoral en el laboratorio de Simon Sponberg en Georgia Tech durante el estudio.
Simplicidad avanzada
El método, o "medir, "como lo llama el estudio, trascendió estas enormes diferencias, que impregnan la robótica de inspiración animal.
"La medida es general (universal) en el sentido de que puede usarse independientemente de si las señales son patrones de picos neuronales, cinemática, tensiones o fuerzas y no depende de la relación particular entre las señales, "escribieron los autores del estudio.
No importa cómo funcione un error o un bot, las entradas y salidas matemáticas de la medida están siempre en las mismas unidades. La medida no siempre eliminará la necesidad de modelar, pero sirve para acortar y guiar el modelado y evitar angustiosos pasos en falso.
Los autores publicaron el estudio en la revista Comunicaciones de la naturaleza en agosto de 2019. La investigación fue financiada por la National Science Foundation. Sponberg es profesor asistente en la Escuela de Física de Georgia Tech y en la Escuela de Ciencias Biológicas.
Los movimientos de las patas de las cucarachas pueden graficarse de manera similar a los movimientos de un péndulo en ondas sinusoidales. Estos conducen a una mejor comprensión matemática de la locomoción del insecto. Crédito:Georgia Tech / Sponberg / Neveln
Centralización vs descentralización
A menudo, un bot o un animal envía muchas señales para caminar a través de un sistema central para armonizar la locomoción, pero no todas las señales están centralizadas. Incluso en humanos, aunque la locomoción depende en gran medida de las señales del sistema nervioso central, algunas señales neuronales se limitan a regiones del cuerpo; son señales localizadas.
Algunos insectos parecen moverse con poca centralización, como los insectos palo, también conocido como bastones, cuyas piernas se mueven casi independientemente. Los insectos palo son corredores torpes.
"La idea era que los bichos de palo tuvieran el control de movimiento más localizado, mientras que una cucaracha va muy rápido y necesita mantener la estabilidad, y su control de movimiento probablemente esté más centralizado, más parecido a un reloj, "Dijo Neveln.
La centralización fuerte de señales generalmente coordina mejor la locomoción. Podría ser un código que viaja a través del cableado de un robot elaborado, las neuronas centrales de una cucaracha sincronizando sus patas, o el torpe chasis del robot que se inclina lejos de una pierna que golpea el suelo poniendo peso sobre una pierna opuesta. Los especialistas en robótica necesitan ver a través de las diferencias y descubrir la interacción de las señales centrales y locales de un locomotor.
Física genial
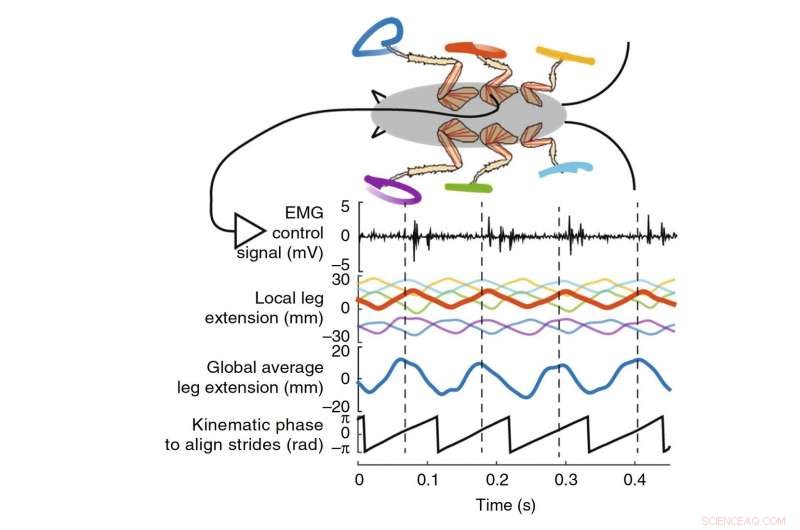
La nueva "medida" hace esto al enfocarse en un fenómeno general en las piernas para caminar, que puede verse como péndula moviéndose hacia adelante y hacia atrás. Para una gran locomoción, necesitan sincronizarse en lo que se denomina oscilaciones de acoplamiento de fase.
Un divertido, Un sencillo experimento ilustra este principio de la física. Si unos pocos, di seis, los metrónomos, un péndulo de ritmo que hace tictac que utilizan los profesores de piano, se mueven fuera de sincronía, y los colocas a todos en una plataforma que se balancea libremente junto con los columpios de los metrónomos, los columpios se sincronizarán al unísono.
Las fases, o direcciones, de sus oscilaciones se acoplan entre sí centralizando sus impulsos mecánicos compuestos a través de la plataforma. Este ejemplo particular de acoplamiento de fase es mecánico, pero también puede ser computacional o neurológico, como en la cucaracha.
Sus patas serían análogas a los metrónomos oscilantes, y actividad neuromuscular central análoga a la plataforma de balanceo libre. En la cucaracha no las seis patas se balancean en la misma dirección.
"Su sincronización no es uniforme. Tres patas están sincronizadas en fase entre sí, las patas delanteras y traseras de un lado con la pata central del otro lado, y esas tres están sincronizadas fuera de fase con las otras tres, "Dijo Neveln." Es un paso de trípode alterno. Un trípode de tres patas se alterna con el otro trípode de tres patas ".
Pogoing inútil
Y al igual que pendula, Los cambios de cada pierna se pueden representar gráficamente como una ola. Todas las ondas de las piernas se pueden promediar en una onda de escurrimiento de cucarachas general y luego se pueden desarrollar en matemáticas más útiles que relacionan la centralización con la descentralización y factores como la entropía que pueden desviar el control de la locomoción.
Los principios y las matemáticas resultantes beneficiaron al torpe robot, que tiene fuertes señales descentralizadas en los motores de sus piernas que reaccionan al contacto de las piernas con el suelo, y un control centralizado más débil que el de los bichos. Los investigadores graficaron los movimientos del robot, también, pero no dieron como resultado el grupo de ondas perfectamente sincronizadas que tenía la cucaracha.
Los investigadores recurrieron a los principios y las matemáticas al torpe robot, que inicialmente estaba de mal humor, saltando o saltando inútilmente como un palo para saltar. Luego, los científicos fortalecieron el control centralizado volviendo a ponderar su chasis para que se mueva de manera más coherente.
"Los metrónomos de la plataforma son de acoplamiento mecánico, y las coordenadas de nuestro robot controlan de esa manera, ", Dijo Neveln." Puede cambiar el acoplamiento mecánico del robot reposicionando sus pesos. Pudimos predecir los cambios que esto haría utilizando la medida que desarrollamos a partir de la cucaracha ".
Sorpresas de cucarachas
Los investigadores también conectaron músculos y neuronas específicos de las cucarachas para observar sus síncopas con las ondas rápidas. Diecisiete cucarachas tomaron 2, 982 pasos para informar los principios y las matemáticas, y los errores también sorprendieron a los investigadores.
Uno sobresalió:los científicos habían pensado que la señalización se centralizaba más cuando la cucaracha aceleraba, pero en vez, Fortalecimiento de la señalización tanto central como local, quizás duplicando el mensaje:¡Corre!