Crédito:CC0 Public Domain
Un equipo de investigadores australianos ha diseñado una estrategia confiable para probar las habilidades físicas de los robots humanoides, robots que se asemejan a la forma del cuerpo humano en su construcción y diseño. Usando una combinación de métodos y algoritmos de aprendizaje automático, el equipo de investigación logró que los robots de prueba reaccionaran eficazmente a cambios desconocidos en el entorno simulado, mejorando sus probabilidades de funcionar en el mundo real.
Los resultados, que fueron publicados en una publicación conjunta del IEEE y la Asociación China de Automatización Revista de Automatica Sinica en julio, tienen implicaciones prometedoras en el amplio uso de robots humanoides en campos como la sanidad, educación, respuesta a desastres y entretenimiento.
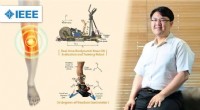
"Los robots humanoides tienen la capacidad de moverse de muchas maneras y, por lo tanto, imitan los movimientos humanos para completar tareas complejas. Para poder hacer eso, su estabilidad es fundamental, especialmente en condiciones dinámicas e impredecibles, "dijo el autor correspondiente Dacheng Tao, Profesor y becario ARC Laureate en la Escuela de Ciencias de la Computación y la Facultad de Ingeniería de la Universidad de Sydney.
"Hemos diseñado un método que enseña de manera confiable a los robots humanoides a poder realizar estas tareas, "añadió Tao, quien también es el Director Inaugural del Centro de Inteligencia Artificial UBTECH Sydney.
Los robots humanoides son robots que se asemejan a los atributos físicos de los humanos:la cabeza, un torso, y dos brazos y pies, y poseen la capacidad de comunicarse con humanos y otros robots. Equipado con sensores y otros dispositivos de entrada, estos robots también realizan actividades limitadas de acuerdo con la entrada externa.
Por lo general, están preprogramados para actividades específicas y se basan en dos tipos de métodos de aprendizaje:basados en modelos y sin modelos. El primero le enseña a un robot un conjunto de modelos que puede usar para comportarse en un escenario, mientras que este último no lo hace. Si bien ambos métodos de aprendizaje han tenido éxito hasta cierto punto, cada paradigma por sí solo no ha demostrado ser suficiente para equipar a un robot humanoide para que se comporte en un escenario del mundo real donde el entorno cambia constantemente y, a menudo, de manera impredecible.
Para superar esto, Tao y su equipo introdujeron una nueva estructura de aprendizaje que incorpora partes del aprendizaje tanto basado en modelos como sin modelos para equilibrar a un bípedo, o de dos piernas, robot. El método de control propuesto cierra la brecha entre los dos paradigmas de aprendizaje, donde la transición de aprender el modelo a aprender el procedimiento real se ha completado sin problemas. Los resultados de la simulación muestran que el algoritmo propuesto es capaz de estabilizar el robot en una plataforma móvil bajo rotaciones desconocidas. Como tal, estos métodos demuestran que los robots son capaces de adaptarse a diferentes situaciones impredecibles en consecuencia y, por lo tanto, se pueden aplicar a robots fuera del entorno del laboratorio.
En el futuro, los investigadores esperan validar su método en entornos más complejos con variables más impredecibles y cambiantes y con dimensiones variables mientras prueban las habilidades de los robots para ejercer un control total del cuerpo.
"Nuestro objetivo final será ver cómo nuestro método permite que el robot tenga control sobre todo su cuerpo cuando está expuesto a perturbaciones inesperadas e inconmensurables, como un terreno cambiante. También nos gustaría ver la capacidad del robot para aprender a imitar movimiento humano, como el movimiento de la articulación del tobillo, sin haber recibido información previa ".