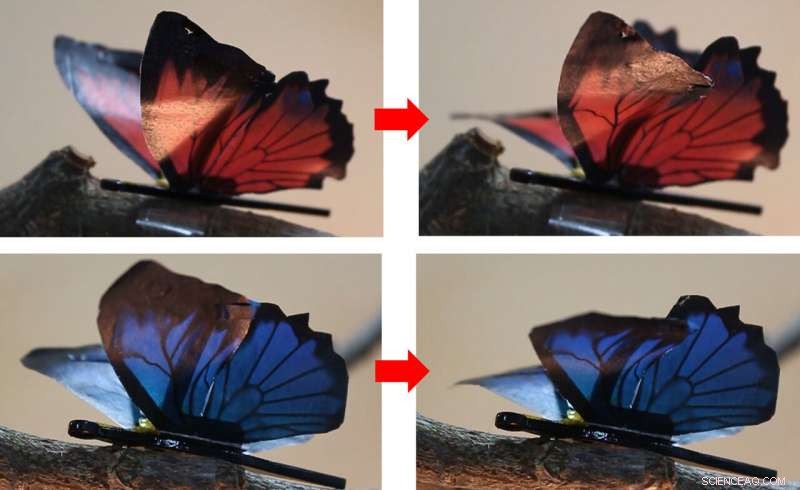
Robots mariposas bailando en la rama de un árbol. Las mariposas pueden batir sus alas después de la aplicación de 2 voltios de entrada de corriente eléctrica alterna con una frecuencia de 0,2 hercios. Crédito:Umrao et al., Sci. Robot. 4, eaaw7797 (2019)
Llevar un broche de flores que florece ante tus ojos suena a magia. Los investigadores de KAIST lo han hecho realidad con músculos robóticos.
Los investigadores han desarrollado un ultrafino, Músculo artificial para robótica blanda. El avance reportado recientemente en la revista Ciencia Robótica , se demostró con un broche robótico de flores florecientes, mariposas robóticas bailando y hojas de árboles revoloteando en una obra de arte cinética.
El equivalente robótico de un músculo que puede moverse se llama actuador. El actuador se expande, se contrae o gira como fibras musculares utilizando un estímulo como la electricidad. Los ingenieros de todo el mundo se esfuerzan por desarrollar actuadores más dinámicos que respondan rápidamente, puede doblarse sin romperse, y son muy duraderos. Suave, Los músculos robóticos podrían tener una amplia variedad de aplicaciones, desde dispositivos electrónicos portátiles hasta prótesis avanzadas.
El equipo del Centro de Iniciativa de Investigación Creativa de KAIST para Nanoingeniería Funcionalmente Antagonista desarrolló una sensible, Músculo artificial flexible y duradero. El actuador parece una tira delgada de papel de aproximadamente una pulgada de largo. Utilizaron un tipo particular de material llamado MXene, que es una clase de compuestos que tienen capas de solo unos pocos átomos de espesor.

Comparación de la flor de Narciso real (arriba) y el robot de flor de Narciso basado en músculos artificiales (abajo) en varias etapas de floración. Crédito:Umrao et al., Sci. Robot. 4, eaaw7797 (2019)
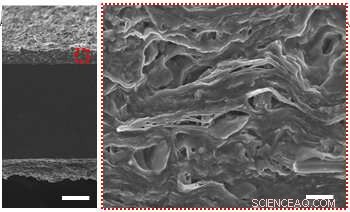
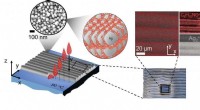
Microscopía electrónica de barrido transversal de MXene y PEDOT:material PSS. Crédito:Umrao et al., Sci. Robot. 4, eaaw7797 (2019)
Su material MXene elegido (Ti 3 C 2 T X ) está hecho de capas delgadas de compuestos de titanio y carbono. No era flexible por sí mismo; las hojas de material se desprenderían del actuador cuando se doblaran en un bucle. Eso cambió cuando el MXene se "reticuló iónicamente", conectado a través de un enlace iónico, a un polímero sintético. La combinación de materiales hizo que el actuador fuera flexible, sin dejar de mantener la fuerza y la conductividad, que es fundamental para los movimientos impulsados por la electricidad.
Su combinación particular funcionó mejor que otros reportados. Su actuador respondió muy rápidamente a la baja tensión, y duró más de cinco horas moviéndose continuamente.
Para demostrar que el diminuto músculo robótico funciona, El equipo incorporó el actuador al arte portátil:un broche inspirado en origami imita cómo una flor de narciso despliega sus pétalos cuando se aplica una pequeña cantidad de electricidad. También diseñaron mariposas robóticas que mueven sus alas hacia arriba y hacia abajo, e hizo revolotear las hojas de una escultura de árbol.
"La robótica portátil y el arte cinético demuestran cómo los músculos robóticos pueden tener aplicaciones divertidas y hermosas, "dijo Il-Kwon Oh, autor principal del artículo y profesor de ingeniería mecánica. "También muestra el enorme potencial de los pequeños, músculos artificiales para una variedad de usos, como los sistemas de retroalimentación háptica y los dispositivos biomédicos activos ".
A continuación, el equipo planea investigar aplicaciones más prácticas de los actuadores blandos basados en MXene y otras aplicaciones de ingeniería de los nanomateriales MXene 2D.