Unidad de origami de giro cuadrado. Crédito:Kotikian et al., Sci. Robot. 4, eaax7044 (2019)
La mayoría de los robots blandos actuales dependen de la alimentación y el control externos, manteniéndolos atados a sistemas externos o equipados con componentes duros. Ahora, Investigadores de la Escuela de Ingeniería y Ciencias Aplicadas (SEAS) de Harvard John A. Paulson y Caltech han desarrollado sistemas robóticos blandos, inspirado en el origami, que pueden moverse y cambiar de forma en respuesta a estímulos externos, allanando el camino para robots blandos completamente libres.
La investigación se publica en Ciencia Robótica .
"La capacidad de integrar materiales activos dentro de objetos impresos en 3D permite el diseño y la fabricación de clases completamente nuevas de materia robótica blanda, "dijo Jennifer A. Lewis, el profesor Hansjorg Wyss de ingeniería de inspiración biológica en SEAS y coautor principal del estudio.
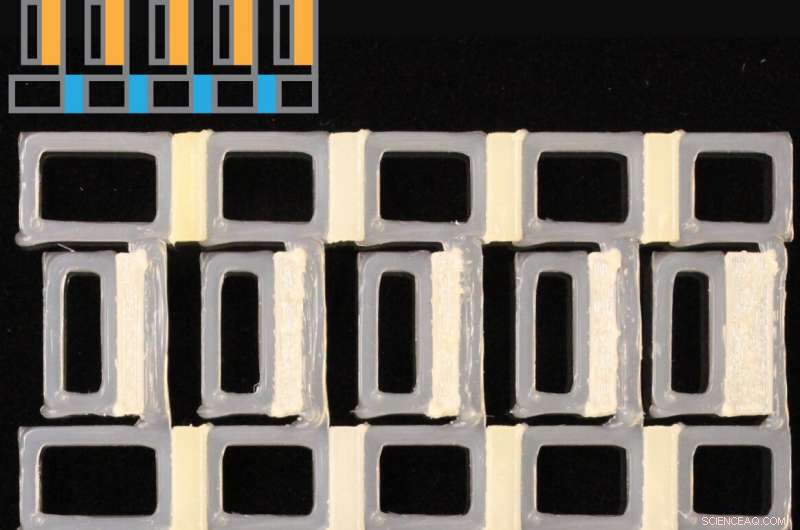
Los investigadores recurrieron al origami para crear robots blandos multifuncionales. A través de pliegues secuenciales, el origami puede codificar múltiples formas y funcionalidades en una sola estructura. El uso de materiales conocidos como elastómeros de cristal líquido que cambian de forma cuando se exponen al calor, El equipo de investigación imprimió en 3D dos tipos de bisagras blandas que se pliegan a diferentes temperaturas y, por lo tanto, se pueden programar para que se plieguen en un orden específico.
"Con nuestro método de impresión 3D de bisagras activas, tenemos una capacidad de programación completa sobre la respuesta de temperatura, la cantidad de torque que pueden ejercer las bisagras, su ángulo de flexión, y orientación del pliegue. Nuestro método de fabricación facilita la integración de estos componentes activos con otros materiales, "dijo Arda Kotikian, estudiante de posgrado en SEAS y la Escuela de Graduados en Artes y Ciencias y co-primer autor del artículo.
"El uso de bisagras facilita la programación de funciones robóticas y el control de cómo un robot cambiará de forma. En lugar de que todo el cuerpo de un robot blando se deforme de formas que pueden ser difíciles de predecir, solo necesita programar cómo responderán algunas regiones pequeñas de su estructura a los cambios de temperatura, "dijo Connor McMahan, estudiante de posgrado en Caltech y co-primer autor del artículo.
Para demostrar este método, Kotikian, McMahan, y el equipo construyó varios dispositivos de software, incluido un robot blando sin ataduras apodado el "Rollbot". El Rollbot comienza como una hoja plana, unos 8 centímetros de largo y 4 centímetros de ancho. Cuando se coloca sobre una superficie caliente, alrededor de 200 ° C, un juego de bisagras se pliega y el robot se enrolla en una rueda pentagonal.
Otro juego de bisagras está incrustado en cada uno de los cinco lados de la rueda. Una bisagra se pliega cuando entra en contacto con la superficie caliente, impulsando la rueda para girar al siguiente lado, donde se pliega la siguiente bisagra. Mientras ruedan por la superficie caliente, las bisagras se despliegan y están listas para el siguiente ciclo.
"Muchos robots blandos existentes requieren una atadura a sistemas de control y energía externos o están limitados por la cantidad de fuerza que pueden ejercer. Estas bisagras activas son útiles porque permiten que los robots suaves operen en entornos donde las ataduras no son prácticas y levantar objetos muchas veces más pesado que las bisagras, "dijo McMahan.
Otro dispositivo cuando se coloca en un ambiente caluroso, se puede plegar en una forma compacta doblada que se asemeja a un clip de papel y desplegarse cuando se enfría.
"Estas estructuras sin ataduras se pueden controlar pasivamente, "dijo Kotikian." En otras palabras, todo lo que tenemos que hacer es exponer las estructuras a ambientes de temperatura específicos y responderán de acuerdo a cómo programamos las bisagras ".
Si bien esta investigación solo se centró en las respuestas a la temperatura, Los elastómeros de cristal líquido también se pueden programar para responder a la luz, pH humedad y otros estímulos externos.
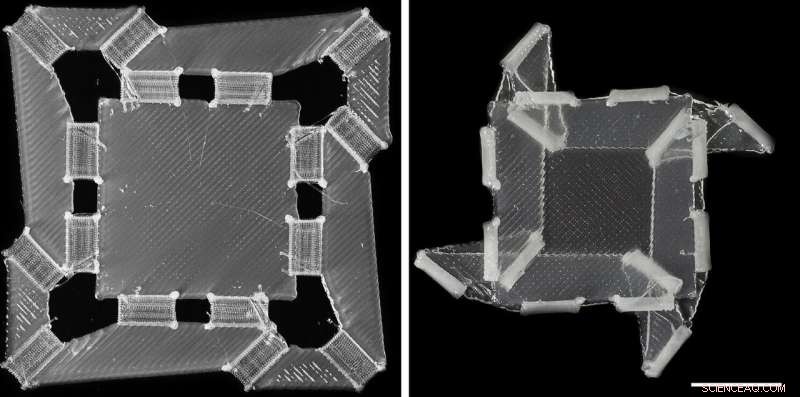
Rollbot autopropulsado mostrado en su configuración impresa (arriba) y en su configuración plegada (abajo). Crédito:Kotikian et al., Sci. Robot. 4, eaax7044 (2019)
"Este trabajo demuestra cómo la combinación de polímeros sensibles en un compuesto diseñado puede conducir a materiales con autoactivación en respuesta a diferentes estímulos. En el futuro, tales materiales se pueden programar para realizar tareas cada vez más complejas, difuminando los límites entre materiales y robots, "dijo Chiara Daraio, Profesor de Ingeniería Mecánica y Física Aplicada en Caltech y coautor principal del estudio.