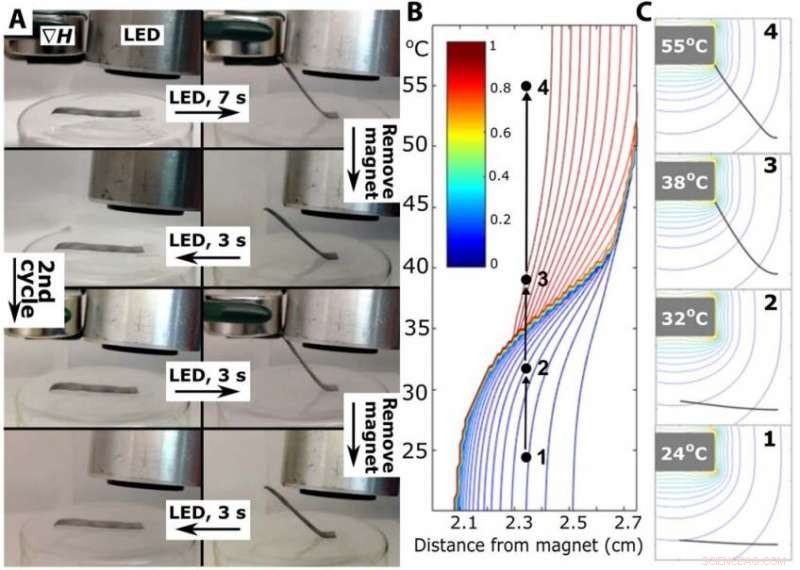
Voladizo con memoria de forma que contiene partículas magnéticas encadenadas. (A) Actuación y (B y C) simulaciones de una película en voladizo DiAPLEX que contiene partículas magnéticas encadenadas. El imán permanente (∇H) y el LED se indican en el panel superior izquierdo. (B) Los contornos muestran el grado de actuación (0, plano; 1, imán de contacto) de un filamento simulado en un rango de posiciones y temperaturas. (C) Las imágenes fijas simuladas corresponden a puntos discretos a lo largo de la ruta indicada en (B), a una distancia de 2,3 cm del imán, que es consistente con la geometría experimental de la izquierda. Vea las películas S1 y S2 para experimentos y simulaciones del voladizo. Crédito:Jessica A.-C. Liu, Universidad Estatal de Carolina del Norte.
Investigadores de la Universidad Estatal de Carolina del Norte y la Universidad de Elon han desarrollado una técnica que les permite controlar de forma remota el movimiento de robots blandos. bloquearlos en su posición durante el tiempo que sea necesario y luego reconfigurar los robots en nuevas formas. La técnica se basa en campos luminosos y magnéticos.
"Estamos particularmente entusiasmados con la reconfigurabilidad, "dice Joe Tracy, profesor de ciencia e ingeniería de materiales en NC State y autor correspondiente de un artículo sobre el trabajo. "Al diseñar las propiedades del material, podemos controlar el movimiento del robot blando de forma remota; podemos conseguir que mantenga una forma determinada; luego podemos devolver el robot a su forma original o modificar aún más su movimiento; y podemos hacer esto repetidamente. Todas esas cosas son valiosas en términos de la utilidad de esta tecnología en aplicaciones biomédicas o aeroespaciales ".
Por este trabajo, los investigadores utilizaron robots blandos hechos de un polímero incrustado con micropartículas de hierro magnético. Bajo condiciones normales, el material es relativamente rígido y mantiene su forma. Sin embargo, los investigadores pueden calentar el material utilizando la luz de un diodo emisor de luz (LED), lo que hace que el polímero sea flexible. Una vez flexible, Los investigadores demostraron que podían controlar la forma del robot de forma remota aplicando un campo magnético. Después de formar la forma deseada, los investigadores podrían quitar la luz LED, permitiendo que el robot recupere su rigidez original, bloqueando efectivamente la forma en su lugar.
Al aplicar la luz por segunda vez y eliminar el campo magnético, los investigadores pudieron hacer que los robots blandos volvieran a sus formas originales. O podrían volver a aplicar la luz y manipular el campo magnético para mover a los robots o hacer que adopten nuevas formas.
En pruebas experimentales, los investigadores demostraron que los robots blandos podrían usarse para formar "agarradores" para levantar y transportar objetos. Los robots blandos también se pueden utilizar como voladizos, o doblado en "flores" con pétalos que se doblan en diferentes direcciones.
"No estamos limitados a configuraciones binarias, como un sujetador abierto o cerrado, "dice Jessica Liu, primer autor del artículo y Ph.D. estudiante en NC State. "Podemos controlar la luz para asegurarnos de que un robot mantenga su forma en cualquier punto".
Además, los investigadores desarrollaron un modelo computacional que se puede utilizar para agilizar el proceso de diseño de robots blandos. El modelo les permite ajustar la forma de un robot, espesor del polímero, la abundancia de micropartículas de hierro en el polímero, y el tamaño y la dirección del campo magnético requerido antes de construir un prototipo para realizar una tarea específica.
"Los siguientes pasos incluyen optimizar el polímero para diferentes aplicaciones, "Dice Tracy". Por ejemplo, polímeros de ingeniería que responden a diferentes temperaturas para satisfacer las necesidades de aplicaciones específicas ".
El papel, "Reconfiguración controlada fototérmica y magnéticamente de compuestos poliméricos para robótica suave, "aparece en el diario Avances de la ciencia . La primera autora del artículo es Jessica Liu, un doctorado estudiante en NC State. Jonathan Gillen es coautor del artículo, un ex licenciado en NC State; Sumeet Mishra, un ex Ph.D. estudiante de NC State; y Benjamin Evans, profesor asociado de física en la Universidad de Elon.