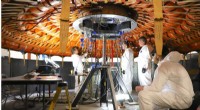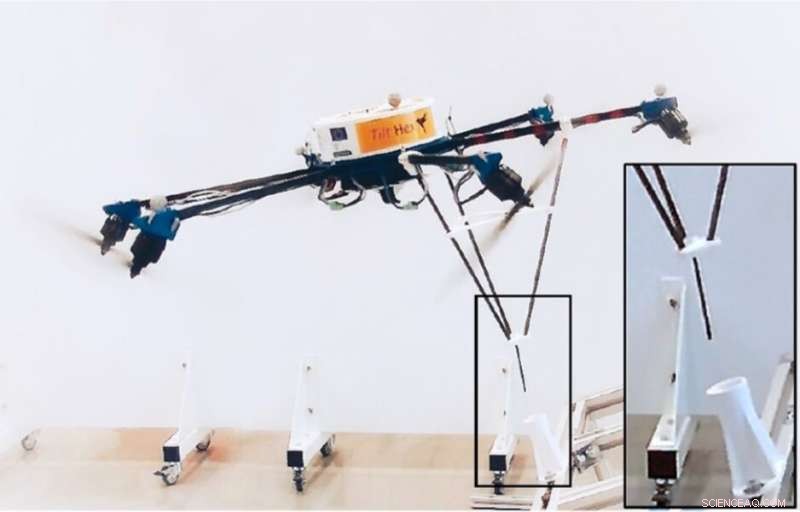
El Tilt-Hex (plataforma aérea NCFTP con hélices inclinadas desarrollada en LAAS-CNRS) con el efector final fijado rígidamente. Observe cómo la interacción tiene lugar lejos y descentrada del CoM del vehículo. Crédito:Ryll et al.
En años recientes, los robots aéreos se han vuelto cada vez más populares, con aplicaciones potenciales en una variedad de campos. Muchos de estos robots están diseñados principalmente para volar y recopilar datos visuales de su entorno circundante. sin embargo, algunos también son capaces de captar, llevar o incluso ensamblar objetos.
Equipar robots aéreos con capacidades avanzadas de interacción física podría ser increíblemente útil, ya que les permitiría completar tareas más complejas. Sin embargo, debido a la naturaleza compleja de la aerodinámica, esto a menudo ha resultado muy desafiante, particularmente cuando un vehículo está cerca de superficies.
Investigadores de la Universidad de Cassino y Southern Lazio, La Universidad de Toulouse y la Universidad de Basilicata han introducido recientemente un nuevo paradigma que permite el control de la interacción 6-D en robots aéreos. Su enfoque esbozado en un artículo publicado en SAGE Revista internacional de investigación robótica , podría allanar el camino hacia el desarrollo de sistemas aéreos más efectivos que funcionen mejor que los robots existentes en tareas de manipulación aérea e interacción física.
El nuevo paradigma propuesto por los investigadores, llamado efector final volador 6-D, se puede aplicar a la mayoría, si no todos, sistemas totalmente accionados que pueden seguir una trayectoria de pose completa con el efector final. En el estudio, se aplicó específicamente a Tilt-Hex, un robot aéreo novedoso, permitiendo el control independiente de su aceleración lineal y angular. Esto finalmente permitió que el robot contrarrestara instantáneamente cualquier llave que encontrara al interactuar con su entorno.
"Al explotar su accionamiento de hélice inclinada, el robot es capaz de controlar la pose 6-D completa (posición y orientación de forma independiente) y ejercer una llave completa (fuerza y torsión de forma independiente) con un efector final rígidamente unido, "explican los investigadores en su artículo." La interacción se logra por medio de un esquema de control de admisión en el que un control de bucle externo gobierna el comportamiento de admisión deseado (es decir, conformidad de interacción / rigidez, mojadura, y masa) y un bucle interno basado en la dinámica inversa aseguraron un seguimiento completo de la pose 6-D ".
El paradigma desarrollado por los investigadores estima las fuerzas de interacción utilizando un observador basado en el impulso mejorado por la unidad de medida inercial (IMU). Cuando se integra con algoritmos robóticos conocidos, puede lograr una estimación de llave inglesa, así como control de movimiento e interacción. Curiosamente, este "sistema integrado" no requiere un sensor de fuerza en su configuración básica y funciona incluso con un conjunto mínimo de sensores.
Los investigadores han evaluado la efectividad del paradigma del efector final volador 6-D en una serie de experimentos, centrándose en cuatro estudios de caso:un toque duro y un deslizamiento sobre una superficie de madera (es decir, la tarea de la superficie deslizante), una tarea inclinada de clavija en el agujero, un experimento de modelado de admitancia, y una tarea en presencia de fuerzas de interacción que varían en el tiempo. Estas evaluaciones arrojaron resultados muy prometedores, demostrando la versatilidad y robustez del enfoque incluso en presencia de incertidumbres ambientales.
Es más, Se descubrió que el nuevo paradigma supera a otras técnicas de manipulación aérea en sus capacidades, así como en su fiabilidad, complejidad y costos. Por lo tanto, podría ayudar al desarrollo de sistemas aéreos más avanzados que se desempeñen mejor en tareas de manipulación e interacción física.
"En el futuro, buscaremos la autonomía total del sistema reemplazando el sistema de captura de movimiento con una estimación de estado completa a bordo, "escriben los investigadores en su artículo". Además, trabajaremos en las fuerzas de contacto de diferenciación en la punta de la herramienta y las perturbaciones en la plataforma (por ejemplo, ráfagas de viento) ".
© 2019 Science X Network