Bien, cada uno a su gusto. Los gatitos que se hacen amigos con ovillos de lana son imanes absolutos para los video-surfers, pero un ejército rival de video-clicksters nunca puede llegar al máximo mirando a los humanoides que navegan hacia donde quieren ir.
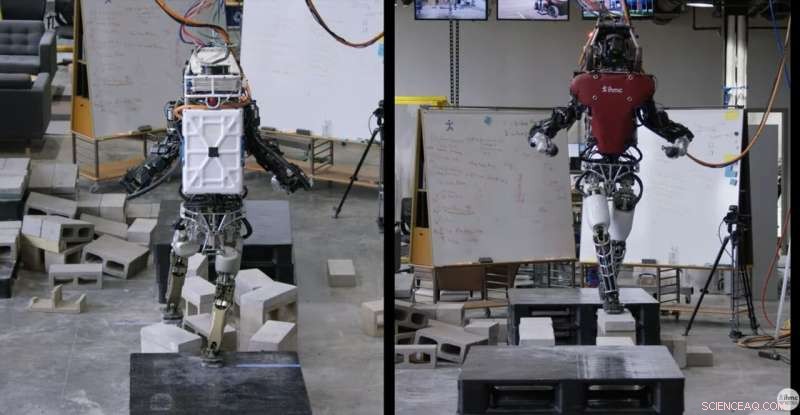
El último video que muestra robots humanoides en movimiento está impresionando a los espectadores con la forma hábil y exitosa en que navegan por un laberinto de bloques de cemento.
El video de este último es IHMC, el Instituto de Cognición Humana y Máquina (IHMC).
"Para caminar por un entorno desordenado y complicado, "dijo el equipo, Los robots con patas necesitan averiguar dónde pueden poner los pies. Desafío agregado:esto debe hacerse rápidamente, si el terreno es plano o complejo.
El programa autónomo de planificación de pasos de IHMC está funcionando en el robot de Boston Dynamics, y Valkyrie desarrollada por la NASA.
El equipo usó los dos robots, Atlas (Boston Dynamics) y Valkyrie (Centro Espacial Johnson de la NASA) para el escaparate más reciente. Otra característica clave fue su 'cabeza'.
"El método utiliza los sensores de las máquinas para encontrar la ruta más eficiente a una ubicación seleccionada por humanos, " dijo TNW.
"En este video, "dijo el narrador, "Utilizamos el cabezal Carnegie Robotics MultiSense SL para generar una nube de puntos del entorno. Al segmentar esta nube de puntos en regiones planas, representamos la enorme cantidad de datos que provienen de los sensores de percepción de una forma mucho más compacta ".
Además, descompusieron estas regiones planas en una colección de polígonos. Engadget :"Luego, cada sección se interpreta en una serie de polígonos para crear un modelo del entorno, para que el robot pueda planificar cada uno de sus pasos para llegar desde su punto de partida hasta su objetivo ".
El equipo de IHMC, durante el desafío DARPA, había utilizado anteriormente el robot Atlas. Un operador dirigió a Atlas. Se colocaron pasos en la interfaz. El proceso fue lento y supuso una carga para el operador. Otro inconveniente fue que su colocación de pasos individuales era propensa a errores. Atlas se cayó el primer día de la competición final.
En esta época, para eludir el error humano, el nuevo sistema permite que un operador seleccione la ubicación deseada, dijo TNW , "pero, en última instancia, se basa en un algoritmo para descubrir cómo llevar el robot allí y evitar obstáculos".
"Básicamente, IHMC gestiona estas complejas operaciones de navegación especificando un punto de inicio y finalización para el robot, "dijo Darrell Etherington en TechCrunch , "y luego mapear todos los caminos posibles paso a paso, evaluar el costo de cada uno y finalmente llegar a la mejor ruta posible, todo lo cual puede ocurrir relativamente rápido en hardware moderno ".
En una escena de video de prueba, muestra al equipo que hace que el robot camine sobre un conjunto de bloques de cemento, donde solo hay unos pocos puntos de apoyo posibles. También pueden planificar rutas en las que el robot no tiene más remedio que utilizar puntos de apoyo parciales.
En la actualidad, dijeron en sus notas de video, el terreno estrecho tiene una tasa de éxito de alrededor del 50 por ciento, el terreno accidentado es de aproximadamente el 90 por ciento, mientras que el terreno plano está cerca del 100 por ciento.
Pittsburgh, Carnegie Robotics, con sede en Pensilvania, mientras tanto, es un proveedor de plataformas y sensores robóticos avanzados. El MultiSense SL original había sido el sensor elegido por los robots humanoides Atlas en el DARPA Robotics Challenge (DRC). Como la cabeza humanoide, la SL proporcionó la mayoría de los datos perceptuales utilizados para la teleoperación, así como para el control automatizado.
¿Que sigue?
"Planeamos aumentar la velocidad del planificador y la capacidad de planificar a través de laberintos y objetivos invisibles, ", dijeron en las notas del video.
Está claro que el equipo sigue intentando conquistar la marcha bípeda.
El equipo de IHMC lo dijo.
"Nuestros proyectos humanoides se centran en impulsar nuestras capacidades humanoides bípedos para manejar terrenos accidentados sin ningún conocimiento del entorno de los sensores a bordo ... También nos estamos enfocando en la capacidad de manejar de manera robusta perturbaciones externas. Nuestro objetivo es abordar cada vez más dificultades desafíos para caminar ".
El video y el documento se enviaron al evento Humanoids 2019 - International Conference on Humanoid Robots que tendrá lugar a finales de este año.
© 2019 Science X Network