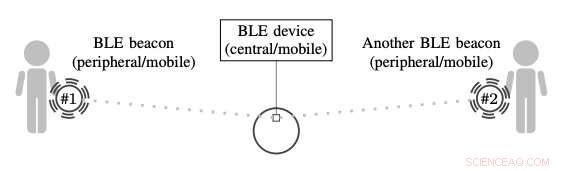
Esta figura muestra la configuración experimental general. Se utiliza un dispositivo BLE central para buscar de forma pasiva anuncios de dispositivos BLE periféricos. Las personas pueden estar equipadas con uno o más dispositivos BLE publicitarios. El dispositivo central calcula paquetes con datos RSS y la identificación de los anuncios recibidos. Estos paquetes se proporcionan a través de una conexión por cable a otro sistema en la placa del robot o de forma inalámbrica a través de una conexión Bluetooth a otra máquina. Como los investigadores no tienen acceso a la placa del robot, utilizaron la conexión bluetooth, lo que produjo una latencia adicional. Crédito:Scheunemann et al.
Investigadores de la Universidad de Hertfordshire han propuesto recientemente una técnica fácil y configurable que mejora la capacidad de un robot para percibir e interactuar con las personas en su entorno. Su técnica, presentado en un artículo publicado previamente en arXiv, utiliza dispositivos asequibles Bluetooth de baja energía (BLE). Entre sus muchas aplicaciones posibles, podría mejorar la terapia para niños con trastorno del espectro autista (TEA), permitiendo que los robots actúen como mediadores y monitoreen a los niños en su entorno.
"Estoy interesado en robots que puedan interactuar de forma totalmente autónoma sin control externo y sin una computadora externa, "Marcus M. Scheunemann, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Comencé mi trabajo en la Universidad de Hertfordshire para desarrollar robots que puedan ser mediadores durante la terapia para niños con autismo".
Desarrollar robots que puedan reconocer con precisión la proximidad con los niños y entre ellos es una tarea considerablemente desafiante. Esto se debe a que los niños generalmente son bastante espontáneos en sus procesos de toma de decisiones, por eso, pueden moverse mucho y cambiar continuamente sus estilos de interacción. Esto dificulta que los robots rastreen a los niños utilizando métodos tradicionales como cámaras o sensores. particularmente si un robot es móvil y tiene poca potencia computacional.
La mayoría de los dispositivos de seguimiento externos que envían información de proximidad a los robots necesitan al menos tres marcadores para poder colocarlos en los niños. Además, para que funcionen correctamente, deben llevarse puestos externamente y estar visibles de forma permanente en todo momento.
Si bien la información proporcionada por muchos dispositivos de rastreo existentes suele ser precisa, Estos dispositivos pueden ser difíciles de aplicar a los niños y, por lo general, restringen sus movimientos a una sola habitación equipada. Para superar las limitaciones de los métodos existentes, Scheunemann y sus colegas desarrollaron una nueva técnica que permite a los robots reconocer el tacto y la proximidad a otros humanos utilizando dispositivos BLE.
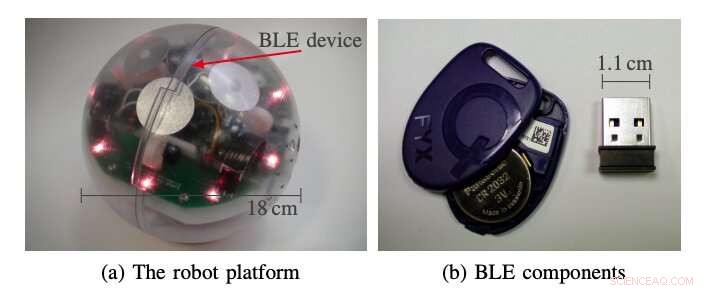
(a) La plataforma de robot móvil QueBall puede moverse hacia atrás e inclinarse hacia la izquierda / derecha. También puede emitir sonido y colores y detecta el tacto. Los investigadores no desarrollaron este robot; simplemente lo usaron como ejemplo. (b) Una baliza publicitaria configurable y autoalimentada que debe conectarse a personas (izquierda) y un dispositivo Bluetooth central, o escáner BLE, es decir, equipa al robot para escanear su entorno en busca de la fuerza de las señales periféricas (derecha). Crédito:Scheunemann et al.
"Utilizar BLE es una forma asequible de eludir los problemas de las técnicas de seguimiento existentes, ", Dijo Scheunemann." Cuando un niño usa al menos una baliza BLE, un robot puede medir la intensidad de la señal e inferir conocimientos sobre qué niño está interactuando en un momento determinado o cuándo lo tocan. Las balizas pueden tener el tamaño de una batería de celda de moneda y se pueden colocar en la ropa o gorras, sin ser visible desde el exterior, contrariamente a los dispositivos de seguimiento externos ".
La técnica ideada por Scheunemann y sus colegas no requiere una cámara y puede calcular toda la información rápidamente a bordo. Además, a diferencia de otros dispositivos de seguimiento, Los dispositivos BLE utilizados por los investigadores son baratos y se pueden comprar fácilmente.
Para probar su técnica, Los investigadores llevaron a cabo tres experimentos de prueba de concepto en un entorno de laboratorio ruidoso utilizando un robot esférico móvil llamado QueBall. Primero, utilizaron su técnica para mejorar la capacidad del robot para inferir información relacionada con la proximidad de los individuos en su entorno circundante.
En un segundo experimento, Scheunemann y sus colegas utilizaron los dispositivos BLE como sensores táctiles, permitiendo que QueBall reconozca cuando estaba siendo tocado. Finalmente, utilizaron su técnica para permitir que el robot distinguiera entre diferentes individuos que interactuaban.
"La técnica propuesta por nosotros simplifica el tener un robot como mediador para la terapia de niños autistas, "Scheunemann dijo." Usando nuestro método, un robot puede inferir información de proximidad sobre un niño determinado, sin la necesidad de calibrar una cámara para el entorno o para cambios ambientales. Esta tecnología también se puede escalar para otros escenarios de interacción humano-robot donde se necesita información de proximidad a un humano ".
En sus evaluaciones, Scheunemann y sus colegas descubrieron que la observación de la intensidad de la señal recibida (RSS) sin procesar entre diferentes dispositivos BLE mejoró significativamente las interacciones de un robot con los humanos. En el futuro, su técnica podría fomentar un comportamiento más adaptativo en robots que operan en una variedad de entornos. Por ejemplo, podría facilitar el empleo de robots como mediadores de terapia para niños con TEA.
"En nuestro trabajo futuro, planeamos utilizar esta tecnología para equipar robots con escáneres BLE, para que puedan inferir fácilmente información relacionada con la proximidad y entre los seres humanos que interactúan ".
© 2019 Science X Network