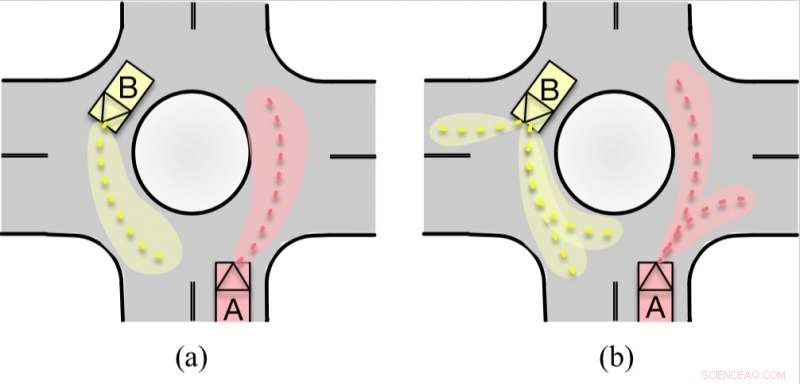
Demostraciones de (a) distribuciones predichas unimodales y (b) multimodales. Crédito:Hu, Zhan y Tomizuka.
Investigadores de la Universidad de California (UC), Berkeley, han desarrollado recientemente un modelo generativo que puede predecir los movimientos secuenciales de pares de agentes que interactúan, incluidos los vehículos autónomos y los vehículos con conductores humanos. Su método, descrito en un artículo publicado previamente en arXiv, es interpretable, lo que significa que puede explicar la lógica detrás de sus predicciones, conduciendo a una mayor confiabilidad y generalización.
"Para que los agentes autónomos operen con éxito en el mundo real, la capacidad de anticipar movimientos futuros de las entidades circundantes en la escena puede mejorar en gran medida sus niveles de seguridad, permitiéndoles evitar situaciones peligrosas de antemano, "Yeping Hu, uno de los investigadores que realizó el estudio, dijo a TechXplore.
Los estudios anteriores han logrado resultados notables en la predicción del comportamiento de agentes o vehículos individuales. Según Hu y sus colegas, sin embargo, considerar estos agentes individualmente a menudo es inútil y limitante, como en el mundo real (por ejemplo, en la carretera), estos agentes suelen interactuar entre sí y, por tanto, sus estados están acoplados. Es más, a medida que se expande el horizonte previsto, El modelado de incertidumbres de predicción y distribuciones multimodales para secuencias futuras se vuelve cada vez más desafiante.
"En nuestro estudio, abordamos este desafío presentando un enfoque de predicción probabilística multimodal, "Hu dijo." El método propuesto se basa en un modelo generativo y es capaz de predecir conjuntamente los movimientos secuenciales de cada par de agentes que interactúan ".
Como lo explicó Wei Zhan, otro investigador involucrado en el estudio, esta predicción conjunta permite, en última instancia, la predicción de la reacción de los movimientos de otros agentes. Puede proporcionar una respuesta a preguntas de "qué pasaría si", como "¿Cuáles serían las posibles reacciones de los demás si el vehículo autónomo anfitrión toma una acción específica en el futuro?" La predicción de reacciones es extremadamente importante para los vehículos autónomos en escenarios de conducción altamente interactivos.
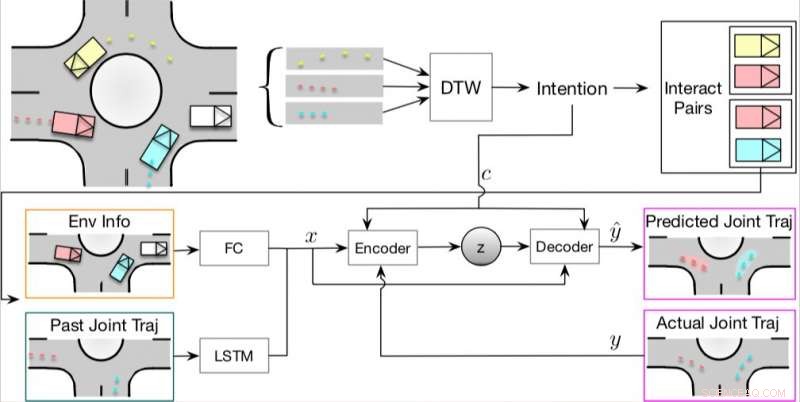
(a) La estructura general del método propuesto. (b) Mapa de rotonda de todos los caminos de referencia. Crédito:Hu, Zhan y Tomizuka.
El modelo desarrollado por Hu y sus colegas se basa en un algoritmo clave, que tiene una estructura similar a los autocodificadores variacionales tradicionales (VAE). En su estudio, los investigadores utilizaron su modelo para predecir los comportamientos interactivos entre dos vehículos, apodado A y B.
"La multimodalidad se puede ver tanto en aspectos discretos como continuos, "Hu explicó." Puede haber muchos discretos, intenciones de alto nivel que están fijadas en la mente de un ser humano, como girar a la izquierda / derecha o salir en un carril determinado en el escenario de la rotonda. También, bajo cada intención, existen varias interacciones continuas, como diferentes grados de comportamiento de aprobación / rendimiento. Por lo tanto, es necesario abordar la multimodalidad cuando estamos prediciendo los comportamientos futuros de otros vehículos, lo que nos puede llevar a resultados de predicción más precisos y razonables ".
Los datos de movimiento del mundo real en escenarios de conducción altamente interactivos son el activo más importante y el requisito previo para la investigación de predicción de comportamiento y movimiento. Los investigadores utilizaron una rotonda compleja de 7 vías con mucho tráfico para recopilar grandes cantidades de datos de movimiento altamente interactivos.
Los datos que recopilaron se utilizaron para entrenar y evaluar el modelo propuesto, dando resultados muy prometedores. Su enfoque superó a tres modelos alternativos que se utilizan comúnmente para predecir el movimiento de agentes autónomos, es decir, VAE condicional, conjunto de perceptrones multicapa (MLP) y abandono de Monte Carlo (MC). En el futuro, su laboratorio también publicará un conjunto de datos de movimiento más completo.
"En nuestro trabajo reciente, mostramos el razonamiento subyacente para el proceso de muestreo de los resultados predichos, "Hu dijo." Aunque todavía hay un largo camino por recorrer para comprender completamente estos algoritmos de caja negra (es decir, redes neuronales), Intentamos proporcionar información significativa de dicho algoritmo de caja negra e intentamos que el algoritmo propuesto fuera seguro de usar. Si estos algoritmos de predicción se van a utilizar algún día en vehículos autónomos reales, Definitivamente será necesario un razonamiento suficiente detrás del algoritmo de predicción ".
El modelo ideado por Hu y sus colegas podría ayudar a mejorar la seguridad de los vehículos autónomos, permitiéndoles predecir interacciones entre otros vehículos en la carretera. En sus próximos estudios, Hu planea abordar aún más el lado de la seguridad del algoritmo de predicción, al mismo tiempo que intenta hacer que el proceso de predicción sea más transparente.
© 2019 Science X Network