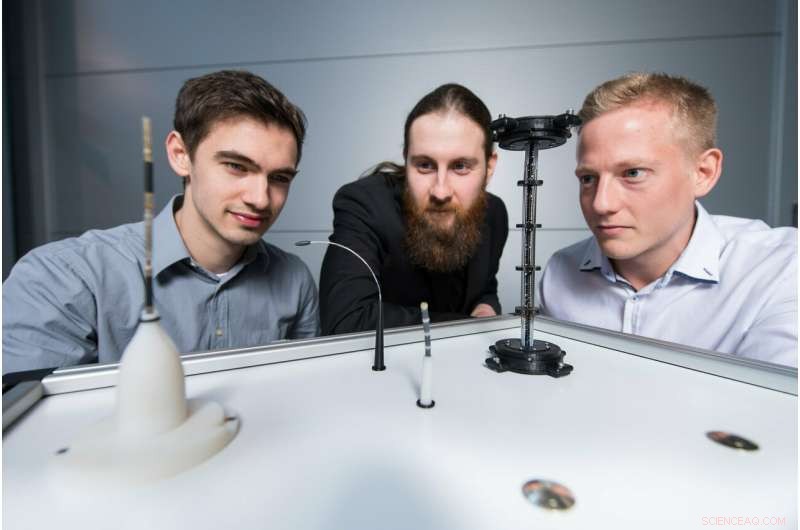
Dominik Scholtes (izq.), Rouven Britz y Yannik Goergen (der.), estudiantes de investigación de doctorado en el equipo del profesor Seelecke, con prototipos de brazos robóticos flexibles. Crédito:Oliver Dietze
A diferencia de los brazos robóticos convencionales con articulaciones articuladas y giratorias, Los nuevos brazos flexibles que están desarrollando el profesor Stefan Seelecke y su grupo de investigación en la Universidad de Saarland se construyen utilizando músculos hechos de cables con memoria de forma que tienen la capacidad de doblarse en casi cualquier dirección y enrollarse en las esquinas.
Los brazos flexibles se alimentan eléctricamente y, por lo tanto, pueden prescindir del equipo neumático habitual u otros accesorios voluminosos. Como la propia aleación con memoria de forma tiene propiedades de sensor, los brazos se pueden controlar sin necesidad de sensores adicionales. La nueva tecnología se puede utilizar para construir grandes brazos robóticos con la flexibilidad de la trompa de un elefante o tentáculos ultrafinos para su uso en operaciones endoscópicas.
Del 1 al 5 de abril, el equipo de investigación estará en Hannover Messe, donde utilizarán prototipos para demostrar las capacidades de los brazos con memoria de forma en el stand de investigación e innovación de Saarland. El equipo de Seelecke está buscando socios interesados en desarrollar la tecnología para aplicaciones prácticas.
Existen límites funcionales para la flexibilidad de los brazos humanos y robóticos. Las articulaciones suelen ser voluminosas y conectan huesos rígidos o conjuntos mecánicos. El movimiento suele estar restringido a determinadas direcciones espaciales. A diferencia de, trompas de elefante y tentáculos de pulpo ofrecen una agilidad mucho mayor. La presencia de decenas de miles de músculos permite a estas criaturas mover el tronco o tentáculo en todas direcciones, para doblarlo en el grado correcto y agarrar cosas con gran poder. Los ingenieros de la Universidad de Saarland se han inspirado en estos modelos naturales y están desarrollando brazos robóticos que eliminan la necesidad de articulaciones o esqueletos o armazones rígidos. creando estructuras ligeras y extremadamente flexibles.
El profesor Stefan Seelecke y su equipo están colaborando con investigadores de la Universidad Técnica de Darmstadt para desarrollar tentáculos artificiales controlados con precisión. En el futuro, el sistema podría utilizarse como guía en cirugía cardíaca o como endoscopio en procedimientos gastroscópicos y colonoscópicos. Por lo tanto, los investigadores están equipando los tentáculos artificiales con funciones adicionales, como una pinza o una punta con rigidez ajustable que ofrece una fuerza de empuje mejorada. Pero la tecnología también se puede ampliar para producir grandes brazos robóticos no muy diferentes a la trompa de un elefante.
La flexibilidad de estos nuevos brazos robóticos proviene de los músculos artificiales utilizados por el equipo de investigación de Saarbrücken. Estos músculos están compuestos por alambres ultrafinos de níquel-titanio (nitinol) que se contraen y alargan de manera controlada. Los hilos de nitinol ultrafinos se contraen como músculos reales, dependiendo de si fluye corriente eléctrica o no.
"El níquel-titanio es lo que se conoce como una aleación con memoria de forma, lo que significa que puede volver a su forma original después de deformarse. Si una corriente eléctrica fluye a través de un cable de nitinol, el material se calienta, haciendo que adopte una estructura cristalina diferente con el resultado de que el cable se acorte. Si la corriente está apagada, el alambre se enfría y se vuelve a alargar, "explica el profesor Seelecke.
Su equipo en el Laboratorio de Sistemas de Materiales Inteligentes de la Universidad de Saarland ha creado haces de estos cables que actúan como fibras musculares artificiales. "Varios alambres ultrafinos proporcionan una gran superficie a través de la cual pueden transferir calor, lo que significa que se contraen más rápidamente. Los cables tienen la densidad de energía más alta de todos los mecanismos de accionamiento conocidos. Y pueden ejercer una fuerza de tracción muy alta en una distancia corta, "explica Seelecke, quien también realiza investigaciones en ZeMA, el Centro de Mecatrónica y Tecnología de Automatización en Saarbrücken. El equipo de investigación de ZeMA está desarrollando una gama de aplicaciones para estos cables, desde nuevos sistemas de refrigeración hasta nuevos tipos de válvulas y bombas.
Para los brazos del robot, los investigadores unen los haces de cables para que actúen como músculos flexores o extensores, cuales, trabajando en concierto, producir un movimiento fluido. "Los tentáculos que podrían usarse en el futuro como catéteres médicos o en procedimientos endoscópicos tienen diámetros de solo alrededor de 300 a 400 micrómetros. Ningún otro sistema de impulsión es de tamaño comparable. Los sistemas anteriores utilizados para procedimientos de catéter eran significativamente más grandes y esto tendía a limitar sus capacidades, "explica Paul Motzki, quien escribió su tesis doctoral sobre los cables con memoria de forma y es asistente de investigación en el grupo del profesor Seelecke.
Los nuevos tentáculos se pueden controlar con mucha precisión y se pueden utilizar para crear herramientas multifuncionales. Por ejemplo, se puede hacer que la punta distal del tentáculo realice un movimiento de empuje. Los investigadores modelan el patrón exacto de movimiento requerido y luego lo programan en un chip semiconductor. Y el sistema no necesita otros sensores. Los propios cables proporcionan todos los datos necesarios. "El material del que están hechos los cables tiene propiedades sensoriales. La unidad del controlador es capaz de interpretar los datos de resistencia eléctrica para conocer la posición y orientación exactas de los cables en cualquier momento, "dice Paul Motzki.
A diferencia de los brazos robóticos convencionales que requieren energía de un motor eléctrico o de un sistema neumático o hidráulico, los brazos no necesitan ningún equipo tan pesado, solo corriente electrica. "Esto hace que el sistema sea liviano, altamente adaptable y silencioso para operar, y significa que los costos de producción son relativamente bajos, "dice el profesor Seelecke. El equipo de investigación exhibirá sus prototipos de sistemas en Hannover Messe y demostrará el potencial de estos novedosos brazos robóticos continuos.