Crédito:Instituto de Tecnología de Massachusetts
Hace 50 años, el primer brazo robótico industrial llamado Unimate montó un desayuno simple de tostadas, café, y champagne. Si bien podría haber parecido una hazaña perfecta, cada movimiento y ubicación se codificó con una cuidadosa consideración.
Incluso con los robots más inteligentes y adaptables de hoy en día, esta tarea sigue siendo difícil para las máquinas con manos rígidas. Suelen funcionar solo en entornos estructurados con formas y ubicaciones predefinidas, y normalmente no puede hacer frente a las incertidumbres en la ubicación o la forma.
En años recientes, aunque, los especialistas en robótica se han enfrentado a este problema haciendo dedos con flexible, materiales como caucho. Esta flexibilidad permite a estos robots blandos recoger cualquier cosa, desde uvas hasta cajas y botellas de agua vacías, pero todavía no pueden manipular artículos grandes o pesados.
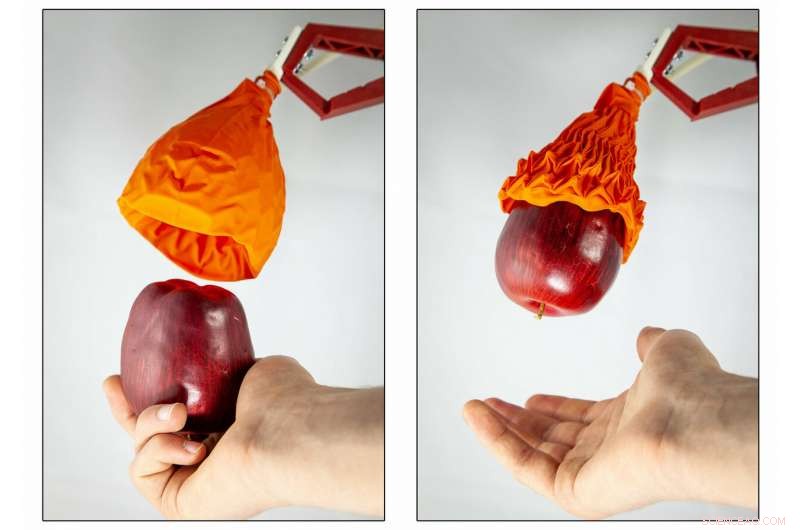
Para ayudar a estos robots blandos, Investigadores del MIT y Harvard han desarrollado una nueva pinza que es suave y fuerte:una estructura de origami en forma de cono que se colapsa sobre los objetos, muy parecido a una Venus atrapamoscas, para recoger artículos que pesen hasta 100 veces su peso. Este movimiento permite que la pinza agarre una gama mucho más amplia de objetos, como latas de sopa, martillos copas de vino, drones e incluso una sola flor de brócoli.
"Una de mis metas a la luna es crear un robot que pueda empacar alimentos automáticamente para usted, "dice la profesora del MIT, Daniela Rus, director del Laboratorio de Ciencias de la Computación e Inteligencia Artificial del MIT (CSAIL), y uno de los autores principales de un nuevo artículo sobre el proyecto.
"Los enfoques anteriores al problema del embalaje solo podían manejar clases muy limitadas de objetos:objetos que son muy livianos u objetos que se ajustan a formas como cajas y cilindros, pero con el sistema de agarre Magic Ball hemos demostrado que podemos hacer tareas de recoger y colocar para una gran variedad de artículos, desde botellas de vino hasta brócoli, uvas y huevos, "dice Rus". En otras palabras, objetos pesados y ligeros. Objetos delicados o robusto, o que tengan formas regulares o libres ".
El proyecto es uno de varios en los últimos años que ha hecho que los investigadores piensen de manera innovadora en el diseño de robots. Pinzas en forma de bola, por ejemplo, puede manejar una gama más amplia de objetos que los dedos, pero todavía tengo el problema de los ángulos limitados. Los dedos robóticos más suaves suelen utilizar aire comprimido, pero no son lo suficientemente fuertes para levantar objetos más pesados.
La estructura de esta nueva pinza, mientras tanto, toma una forma completamente diferente. En forma de cono, hueco, y accionado por vacío, el dispositivo se inspiró en la "bola mágica de origami" y puede envolver un objeto completo y levantarlo con éxito.
La pinza tiene tres partes:la estructura del esqueleto basada en origami, la piel hermética para revestir la estructura, y el conector. El equipo lo creó utilizando un molde de goma mecánico y un plástico especial termoencogible que se auto-pliega a altas temperaturas.
El esqueleto de la bola mágica está cubierto por un globo de goma o una fina hoja de tela, no muy diferente de la investigación anterior del equipo sobre músculos artificiales inspirados en origami impulsados por fluidos (FOAM), que consistía en una piel hermética que rodeaba un esqueleto plegable y fluido.
El equipo utilizó la pinza con un robot estándar para probar su fuerza en diferentes objetos. La pinza podría agarrar y levantar objetos en un 70 por ciento de su diámetro, lo que le permitió recoger y sostener una variedad de alimentos blandos sin causar daños. También puede recoger botellas que pesen más de cuatro libras.
"Empresas como Amazon y JD quieren poder recoger una gama más amplia de objetos delicados o de forma irregular, pero no con las pinzas con ventosa y con base para los dedos, "dice Shuguang Li, un postdoctorado conjunto en MIT CSAIL y la Escuela de Ingeniería y Ciencias Aplicadas (SEAS) John A. Paulson de Harvard. "Las ventosas no pueden recoger nada con agujeros, y necesitarían algo mucho más fuerte que una pinza de dedos suaves".
Actualmente, el robot funciona mejor con objetos cilíndricos como botellas o latas, lo que algún día podría convertirlo en un activo para las líneas de producción en las fábricas. No es sorprendente, la forma de la pinza hace que sea más difícil agarrar algo plano, como un sándwich o un libro.
"Una de las características clave de este enfoque para la construcción de manipuladores es su simplicidad, "dice Robert Wood, coautor y profesor de la Escuela de Ingeniería de Harvard y del Instituto Wyss de Ingeniería de Inspiración Biológica. "Los materiales y las estrategias de fabricación utilizadas nos permiten prototipar rápidamente nuevas pinzas, personalizado para el objeto o el entorno según sea necesario ".
En el futuro, el equipo espera tratar de resolver el problema del ángulo y la orientación agregando visión por computadora que permita a la pinza "ver", y permiten captar partes específicas de objetos.
"Este es un dispositivo muy inteligente que utiliza el poder de la impresión 3D, una aspiradora, y robótica blanda para abordar el problema del agarre de una manera completamente nueva, "dice Michael Wehner, un profesor asistente de robótica en UC-Santa Cruz que no participó en el proyecto. "En los próximos años, Podía imaginarme viendo robots blandos lo suficientemente suaves y diestros como para coger una rosa, pero lo suficientemente fuerte como para levantar con seguridad a un paciente del hospital ".