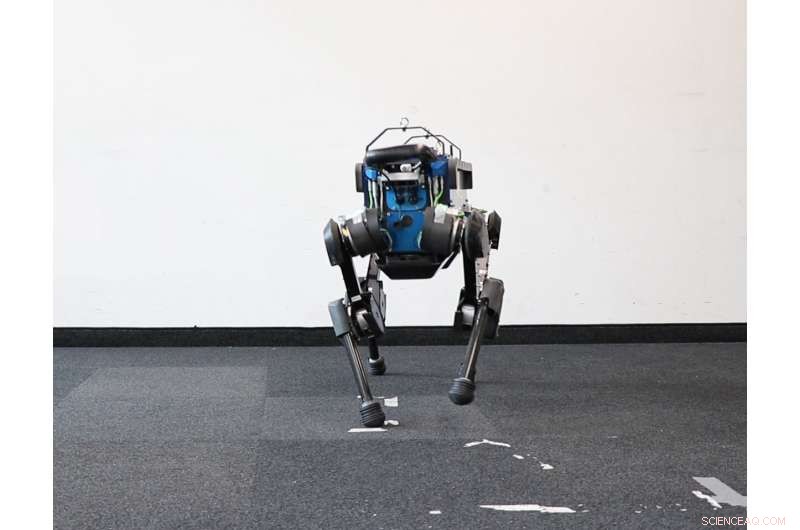
El robot ANYmal. Crédito:Hwangbo et al., Sci. Robot. 4, eaau5872 (2019)
Un equipo de investigadores del Laboratorio de sistemas robóticos en Suiza y el Laboratorio de sistemas inteligentes en Alemania y los EE. UU. Ha encontrado una forma de aplicar el aprendizaje automático a la robótica para dar a estas máquinas mayores capacidades. En su artículo publicado en la revista Ciencia Robótica , el grupo describe cómo aplicaron el aprendizaje automático a la robótica y, al hacerlo, le dieron a un robot canino más agilidad y velocidad.
El aprendizaje automático ha aparecido mucho en las noticias últimamente, a medida que dichos sistemas continúan avanzando sigilosamente sobre las capacidades humanas, dándoles capacidades sin precedentes. En este nuevo esfuerzo, los investigadores buscaron aplicar parte de esa misma mejora a un robot parecido a un perro llamado ANYmal, una máquina sin ataduras del tamaño de un perro grande que puede caminar de maneras muy parecidas a las de un animal real. ANYmal fue creado originalmente por un equipo de Robotic Systems Lab y se ha comercializado. Ahora, la compañía se ha asociado con Intelligent Systems Lab para darle al robot la capacidad de aprender a hacer las cosas que hace a través de la práctica. en lugar de a través de la programación.
El aprendizaje automático funciona estableciendo objetivos para un sistema y luego brindándole un medio para probar formas de lograr esos objetivos, mejorando continuamente a medida que se alcanzan los puntos de referencia. La prueba se realiza una y otra vez, a veces miles de veces. Dichas pruebas son difíciles con un robot tanto por los muchos factores involucrados (como todos los atributos involucrados en mantener el equilibrio) como por la enorme inversión de tiempo. Después de encontrar una forma de abordar el primer problema, los investigadores encontraron una forma de evitar el segundo. En lugar de tener CUALQUIER lucha a través de su régimen de aprendizaje en el mundo real, los investigadores crearon una versión virtual del robot que podría ejecutarse en una simple computadora de escritorio.
Los investigadores señalan que permitir que el robot aprenda mientras está en su encarnación virtual fue aproximadamente 1000 veces más rápido de lo que hubiera sido en el mundo real. Dejaron que el perro virtual se entrenara a sí mismo durante hasta 11 horas y luego descargaron los resultados al robot físico. Las pruebas mostraron que el enfoque funcionó muy bien. La versión nueva y mejorada de ANYmal era más ágil (capaz de evitar que un humano lo pateara y podía enderezarse si se caía) y corría aproximadamente un 25 por ciento más rápido.
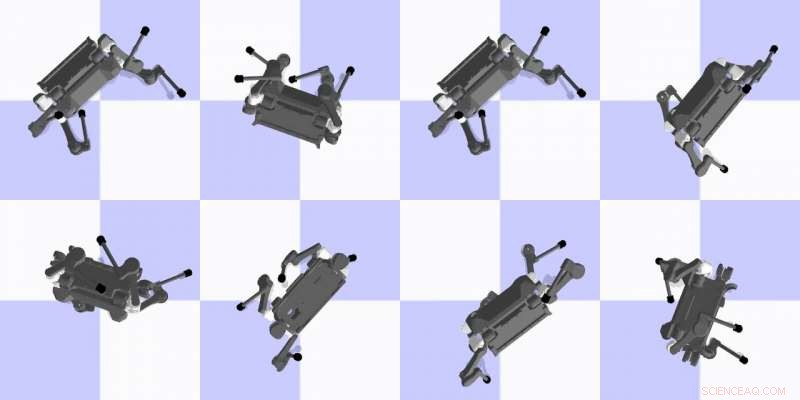
Diferentes configuraciones de caída del robot ANYmal. Crédito:Hwangbo et al., Sci. Robot. 4, eaau5872 (2019)
© 2019 Science X Network