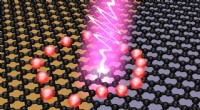
Conjunto codificado de forma de microactuadores magnéticos en forma de microvehículo. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
El ensamblaje coloidal autopropulsado y dirigido por el campo se puede utilizar para construir micromáquinas para realizar movimientos y funciones complejas, aunque su integración como componentes heterogéneos con estructuras específicas, La dinámica y las funciones dentro de las micromáquinas es un desafío. En un estudio reciente sobre Materiales de la naturaleza , Yunus Alapan y colaboradores de los departamentos de inteligencia física y materiales complejos en Alemania y Suiza describieron el autoensamblaje dinámico de micromáquinas móviles con configuraciones deseadas utilizando interacciones físicas preprogramadas entre unidades estructurales y motoras.
Condujeron el ensamblaje utilizando interacciones dielectroforéticas (DEP) codificadas en una forma tridimensional (3-D) de partes individuales. Siguieron el protocolo al ensamblar las nuevas micromáquinas con partes de motor magnéticas y autopropulsadas para una locomoción reconfigurable y grados adicionales de libertad que hasta ahora no se habían logrado con los microrobots monolíticos convencionales. La estrategia de ensamblaje selectivo del sitio fue versátil y se pudo demostrar en diferentes reconfigurable, Micromáquinas móviles jerárquicas y tridimensionales (3-D). Los científicos anticipan los principios de diseño presentados en el trabajo para avanzar e inspirar el desarrollo de micromáquinas más sofisticadas integradas en sistemas jerárquicos multiescala.
Las micromáquinas móviles ofrecen un potencial significativo para sondear y manipular el mundo microscópico y crear orden / ensamblajes funcionales a micro y mesoescala. Una micromaquina puede estar compuesta de varias partes, materiales o químicas para abordar múltiples funciones, incluyendo actuación, sintiendo transporte y entrega. Los modos funcionales y el rendimiento de una micromáquina pueden ser dictados por la organización colectiva y la interacción de sus componentes.
Por ejemplo, Las partículas magnéticas que interactúan bajo campos magnéticos giratorios pueden ensamblarse en cadenas o ruedas capaces de moverse cerca de superficies sólidas. Similar, Los científicos han desarrollado micro nadadores activados por luz dentro de cristales vivos y han permitido la autorrotación regulando el consumo de productos químicos. Para diseñar una mayor complejidad, Los bioingenieros y los científicos de materiales deben permitir interacciones físicas programables en partes individuales para acciones específicas de forma y material bajo influencias externas. Los ejemplos incluyen el desarrollo de microestructuras compuestas ensambladas como coloides utilizando moldes virtuales eléctricos y magnéticos.
Si bien los nuevos enfoques se han mostrado prometedores para construir conjuntos estructurales programables, estos quedan por traducir en conjuntos de micromáquinas móviles. En el presente trabajo, Alapan y col. introdujo un proceso de ensamblaje dirigido para construir micromáquinas de compuestos móviles utilizando fuerzas dielectroforéticas (DEP) para codificar la distribución controlada con precisión de gradientes de campo eléctrico alrededor de un cuerpo modulando su geometría 3-D.
Los resultados mostraron microactuadores direccionales y selectivos del sitio con una estrategia de ensamblaje con codificación de forma versátil. Mostraron la posibilidad de mejorar el fortalecimiento entre los actuadores y el cuerpo ajustando las fuerzas DEP para proporcionar control sobre la rotación. Alapan y col. implementó una nueva estrategia de diseño de ensamblaje dirigido para controlar la dinámica operativa entre componentes funcionales utilizando fuerzas DEP codificadas por forma. El trabajo experimental proporcionará un rico espacio de diseño para desarrollar micromáquinas funcionales y microbots móviles para realizar tareas complejas.
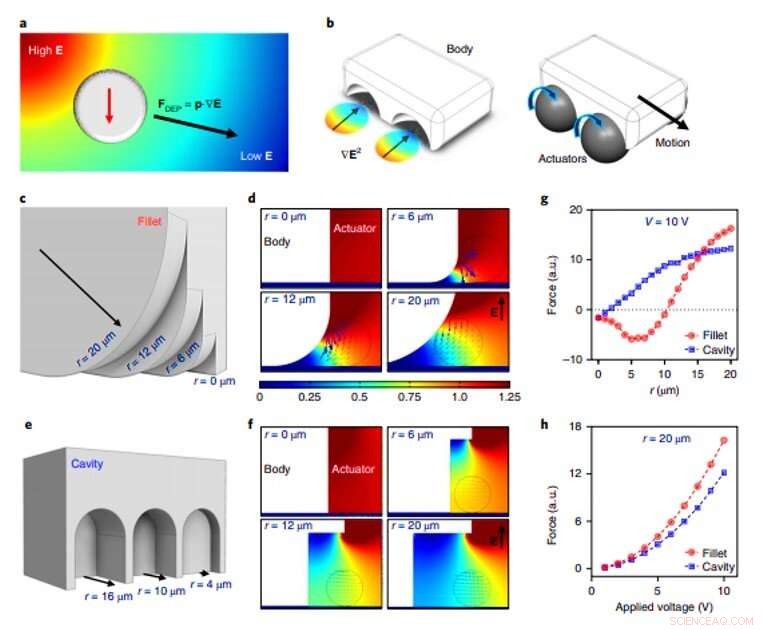
Codificación espacial de los sitios de atracción DEP modulando la geometría 3D. (a), Una partícula polarizada negativamente, con una permitividad relativa más baja que el medio (εp <εm) experimenta una fuerza DEP hacia las magnitudes de campo más bajas bajo un campo eléctrico no uniforme. (B), Las fuerzas DEP se pueden aprovechar para el ensamblaje codificado de componentes funcionales controlando los gradientes de campo eléctrico local generados alrededor de un cuerpo a través de su geometría. (c – f), Diferentes perfiles de superficie 3D (filete o cavidad) de un cuerpo sólido alteran la intensidad del campo eléctrico alrededor del cuerpo (c, mi), crear gradientes locales alrededor de los perfiles de la superficie en función de la dimensión de la característica, r (d, F). Las flechas representan gradientes de campo eléctrico dentro de la región circular que representa un microaccionador (10 µm de diámetro), que se encuentra en el punto de máxima fuerza. Barra de color de intensidad de campo eléctrico normalizado (E / E0) 2. (gramo, h), Los actuadores más pequeños polarizados negativamente experimentan una fuerza DEP hacia (F> 0) o alejándose (F <0) de la sangría debido al gradiente de campo alrededor del perfil de la superficie. La magnitud y la dirección de la fuerza DEP dependen del tipo de perfil y el tamaño de la característica (g), así como la tensión aplicada (h). Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
Alapan y col. Primero programó los gradientes de campo alrededor de una construcción para impulsar el ensamblaje de piezas de micromáquina en las ubicaciones deseadas utilizando interacciones DEP. El principio de funcionamiento del dispositivo bajo campos eléctricos se basaba en la regulación dependiente de la forma de los campos eléctricos alrededor de los cuerpos polarizables de la micromáquina ensamblada. Para programar los gradientes locales, investigaron cómo los campos no eléctricos podrían modularse alrededor de diferentes geometrías.
Luego, los científicos demostraron el autoensamblaje controlado de micromáquinas móviles influenciadas por campos eléctricos, donde se centraron por primera vez en el montaje de un microvehículo simple. El microvehículo experimental contenía un gran cuerpo esférico dieléctrico no magnético y varios microactuadores magnéticos más pequeños organizados alrededor del cuerpo más grande. Cuando aplicaron un campo eléctrico en el eje Z, el cuerpo no magnético generó gradientes de campo eléctrico local para atraer microactuadores más pequeños alrededor de sus polos. Los actuadores magnéticos recién ensamblados sirvieron como ruedas propulsoras y Alapan et al. podría dirigir el microvehículo cambiando la dirección del campo magnético aplicando un campo magnético de rotación vertical.
Si bien aumentaron la velocidad del microvehículo al aumentar el número de microactuadores, cuando el voltaje en el sistema aumentó, la velocidad del microvehículo disminuyó en su lugar. Los científicos supusieron que esto se debía al aumento del acoplamiento mecánico entre las micropartículas y el sustrato durante las interacciones DEP. Los investigadores utilizaron el método para capturar distribuidos aleatoriamente, partículas no magnéticas con microactuadores magnéticos aplicando un campo eléctrico, luego los trasladó a una nueva posición utilizando un campo magnético giratorio para liberarlos al apagar el campo eléctrico.
Montaje y traslación de un microvehículo compuesto con actuadores magnéticos. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
Para controlar los grados de libertad de rotación del microvehículo, Alapan y col. podría regular la fuerza de las fuerzas atractivas de DEP entre el cuerpo pasivo y los microactuadores para ajustar su acoplamiento mecánico. Por ejemplo, a bajas tensiones, las pequeñas fuerzas atractivas de DEP condujeron a un fenómeno de acoplamiento suelto basado en lubricación que permitió que los microactuadores se movieran libremente alrededor del poste. Las articulaciones rotativas desarrolladas en el estudio pueden volverse cruciales para sistemas biológicos específicos durante el desarrollo de moléculas sintéticas, nano y micromáquinas para su aplicación en la transmisión mecánica de energía.
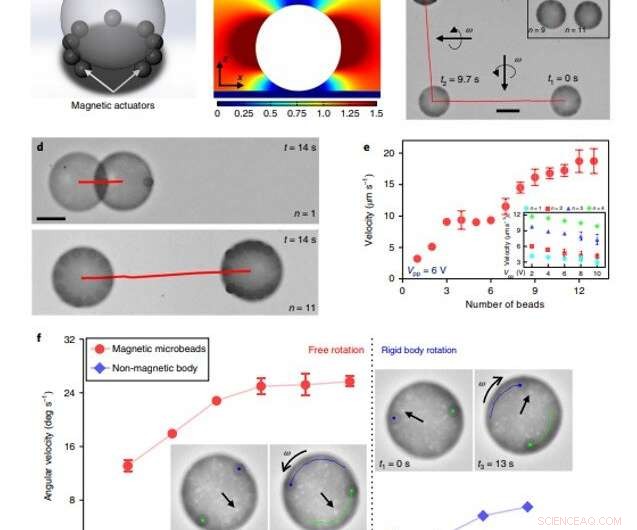
Montaje reversible de microactuadores magnéticos de cuerpo no magnético mediante fuerzas DEP. (a, B), Varias micropartículas magnéticas (10 µm de diámetro) pueden ser atraídas cerca de un cuerpo esférico no magnético (60 µm de diámetro) (a) hacia regiones con menor intensidad de campo eléctrico alrededor de los polos (b). Barra de color de intensidad de campo eléctrico normalizado (E / E0) 2. (C), El microrobot ensamblado se traduce mediante el movimiento de rodadura de los microactuadores bajo un campo magnético giratorio (ω). El microrobot se puede dirigir cambiando la dirección del campo magnético aplicado. Barra de escala, 50 µm. Recuadro, el número de microactuadores magnéticos (n) ensamblados alrededor del cuerpo se puede ajustar mediante la captura controlada de microactuadores. (D, mi), El número de microactuadores magnéticos, así como el voltaje aplicado (inserción), determinar la velocidad de los microrobots ensamblados. Barra de escala en d, 30 µm. (F), Cuando se aplica un campo magnético rotacional en el plano x – y, los actuadores giran libremente alrededor del cuerpo no magnético a bajos voltajes. Con aumento de voltaje, los actuadores se acoplan mecánicamente al cuerpo no magnético, lo que da como resultado la rotación del cuerpo rígido del microrobot. Las barras de error indican s.d. de tres réplicas experimentales. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
Luego, los investigadores realizaron el autoensamblaje programable de micromáquinas móviles con interacciones físicas codificadas por formas mediante el diseño de marcos de micromáquinas con geometrías 3D específicas para generar gradientes de campo eléctrico. El marco 3-D atrajo selectivamente microactuadores a las ubicaciones deseadas en el marco de la micromáquina que los científicos fabricaron usando litografía de dos fotones. Para el primer diseño, los científicos crearon un microcoche con bolsillos en las cuatro ruedas para generar fuerzas DEP y guiar el montaje de microactuadores magnéticos en los bolsillos. Realizaron el autoensamblaje a pedido del microcoche en cuestión de segundos después de aplicar un campo eléctrico para la rotación libre de las ruedas magnéticas dentro de los bolsillos como resultado de un campo magnético que gira verticalmente. Cuando encendieron el campo eléctrico a un valor alto, los microactuadores magnéticos se autoensamblan en los sitios de acoplamiento para un acoplamiento rígido entre el marco del micro-rotor y los microactuadores magnéticos. Cuando aplicaron un campo magnético giratorio horizontalmente, el conjunto del micromotor giraba como un cuerpo rígido.
Los científicos ampliaron el prototipo para construir micromáquinas reconfigurables impulsadas por micromotores autopropulsados. Para esto, diseñaron micromáquinas ensambladas con sílice Janus autopropulsada (SiO 2 ) micropartículas con capa de oro (Au). La autopropulsión dependiente de la frecuencia y la respuesta DEP de las micropartículas de Janus les permitió diseñar micromáquinas móviles con una organización espacial y una cinemática reconfigurables. Esta configuración experimental también demostró una forma de autorreparación.

DERECHA:Conjunto reconfigurable codificado en forma de micromáquinas con microactuadores autopropulsados para una locomoción sintonizable en frecuencia. (a), Las micropartículas Janus SiO2 con una capa de Au pueden moverse activamente en base a sDEP a altas frecuencias e ICEP a bajas frecuencias. La dirección de la locomoción es hacia Au cap en sDEP e inversa en ICEP. (B), La partícula Janus experimenta una fuerza DEP hacia magnitudes de campo eléctrico más altas y más bajas a frecuencias altas y bajas, respectivamente. (c – e), Un cuerpo de microcoche con sitios de ensamblaje hemicilíndricos y fileteados está diseñado para generar una atracción selectiva de microactuadores sintonizable en frecuencia. Las partículas de Janus son atraídas hacia la línea ecuatorial de los hemicilindros a altas frecuencias y hacia el sitio fileteado a bajas frecuencias. Barra de color de intensidad de campo eléctrico normalizado (E / E0) 2. La propulsión de las partículas de Janus ensambladas en los sitios hemicilíndricos da como resultado la rotación del cuerpo del microcoche, mientras que el ensamblaje en el sitio fileteado genera una traducción lineal. F, gramo, La reconfiguración bajo demanda del modo de locomoción se logra sintonizando la frecuencia y reorganizando el diseño espacial del conjunto. Barras de escala, 25 µm. IZQUIERDA:Ensamblaje jerárquico de múltiples micromáquinas mediante interacciones DEP codificadas por formas. (C.A), El montaje jerárquico de dos pasos se realiza mediante el montaje de las unidades de micromáquina 1 y 2 con partículas de Janus autopropulsadas (i) y mediante el montaje lateral de la unidad 1 y la unidad 2 (ii). Las unidades de micromáquina están diseñadas para montaje lateral selectivo, donde la parte inferior de las repisas en la unidad más grande 2 genera campos eléctricos bajos que atraen a la unidad más pequeña 1. Intensidad de campo eléctrico normalizada de barra de color (E / E0) 2. (D, mi), El montaje paralelo de micromáquinas móviles mantiene el movimiento lineal de las unidades, mientras que el ensamblaje antiparalelo da como resultado un movimiento de rotación. Barras de escala, 25 µm. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
Alapan y col. expandió las interacciones DEP codificadas por forma observadas para definir interacciones físicas entre las micromáquinas móviles allanando el camino para ensamblajes jerárquicos de múltiples máquinas. Como prueba de principio, diseñaron un ensamblaje jerárquico de dos niveles entre las micromáquinas constituyentes.
Los científicos ampliaron el diseño introducido en el presente trabajo a la manipulación de microactuadores en 3D y al ensamblaje de micromáquinas con un potencial significativo para su aplicación en dispositivos de laboratorio en un chip para facilitar el transporte continuo. clasificación, manipulación digital de microobjetos y generación de flujo de microfluidos. De este modo, Yunus Alapan y sus colaboradores diseñaron e implementaron el autoensamblaje programable utilizando el ensamblaje dinámico de micromáquinas de forma dirigida a partir de subunidades modulares estructurales y de motor para proporcionar un control sin precedentes sobre la dinámica y las funciones. El método puede proporcionar una solución para diseñar microrobots multifuncionales / materiales, ya que los científicos lograron incorporar los componentes heterogéneos para la detección, carga y accionamiento de carga juntos en un solo paso.
Para aplicaciones sin campos eléctricos como aplicaciones biomédicas in vivo, los científicos tendrán como objetivo optimizar y aprovechar el ensamblaje irreversible de microcomponentes para un rendimiento optimizado. El trabajo tiene un potencial significativo para desarrollar multifuncional, micromáquinas reconfigurables y sistemas jerárquicos complejos inspirados en la vida en ciencia de materiales para aplicaciones en microrrobótica, ciencia coloidal, medicina y microsistemas autónomos.
© 2019 Science X Network