Un nuevo enfoque "ambidiestro" permite a los robots agarrar una amplia gama de objetos sin entrenamiento. Crédito:Adriel Olmos
El comercio electrónico continúa expandiéndose y alcanzó nuevos niveles durante la reciente temporada navideña. Para atender rápidamente el enorme volumen y variedad de pedidos, empresas como Amazon, Walmart, y Alibaba están invirtiendo fuertemente en nuevos almacenes. Para abordar la escasez de trabajadores, muchas empresas están considerando la posibilidad de utilizar robots. Sin embargo, comprender de manera confiable una amplia gama de productos sigue siendo un gran desafío para la robótica.
En un artículo publicado el miércoles, 16 de enero en Ciencia Robótica , ingenieros de la Universidad de California, Berkeley presenta una novela, Enfoque "ambidiestro" para captar una amplia gama de formas de objetos sin entrenamiento.
"Una sola pinza no puede manipular todos los objetos, "dijo Jeff Mahler, investigador postdoctoral en UC Berkeley y autor principal del artículo. "Por ejemplo, una ventosa no puede crear un sello en objetos porosos como la ropa y es posible que las pinzas de mordazas paralelas no puedan alcanzar ambos lados de algunas herramientas y juguetes ".
Mahler trabaja en el laboratorio de Ken Goldberg, un profesor de UC Berkeley con nombramientos conjuntos en el Departamento de Ingeniería Eléctrica y Ciencias de la Computación y el Departamento de Ingeniería Industrial e Investigación de Operaciones.
Los sistemas robóticos utilizados en la mayoría de los centros logísticos de comercio electrónico se basan en pinzas de succión que pueden limitar la gama de objetos que pueden agarrar. El documento de UC Berkeley presenta un enfoque "ambidiestro" que es compatible con una variedad de tipos de pinzas. El enfoque se basa en una "función de recompensa" común para cada tipo de pinza que cuantifica la probabilidad de que cada pinza tenga éxito. Esto permite que el sistema decida rápidamente qué pinza utilizar para cada situación. Para calcular de forma eficaz una función de recompensa para cada tipo de pinza, El artículo describe un proceso para aprender las funciones de recompensa mediante el entrenamiento en grandes conjuntos de datos sintéticos generados rápidamente usando aleatorización de dominio estructurado y modelos analíticos de sensores y la física y geometría de cada pinza.
Cuando los investigadores entrenaron funciones de recompensa para una pinza de mandíbula paralela y una pinza de ventosa en un robot de dos brazos, descubrieron que su sistema despejaba contenedores con hasta 25 objetos nunca antes vistos a una velocidad de más de 300 recolecciones por hora con un 95 por ciento de confiabilidad.
"Cuando estás en un almacén armando paquetes para la entrega, los objetos varían considerablemente, ", dijo Goldberg." Necesitamos una variedad de pinzas para manejar una variedad de objetos ".
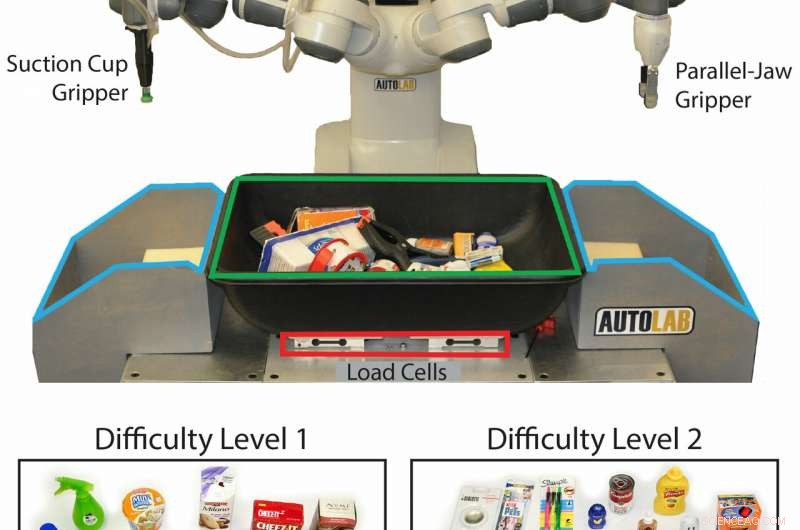
Configuración del robot ambidiestro de dos brazos y los objetos que intentó agarrar, categorizado en dos niveles de dificultad. Crédito:Mahler et al., Sci. Robot. 4, eaau4984 (2019)