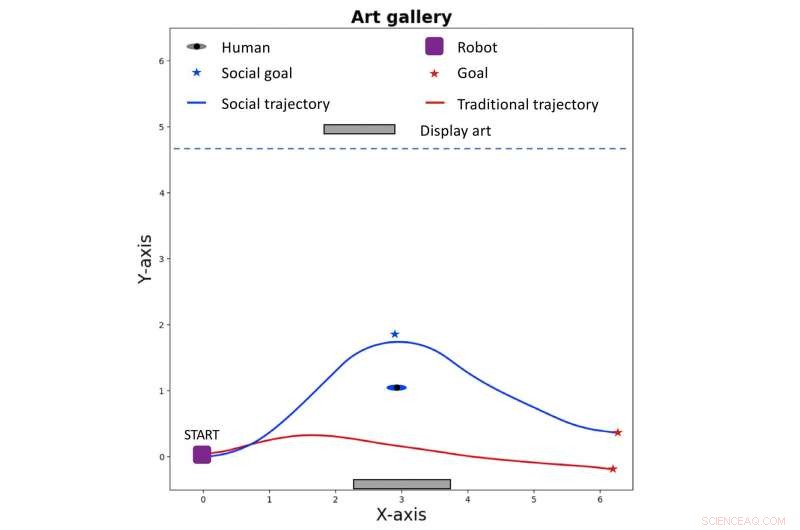
Un robot móvil teniendo en cuenta el espacio de actividad en una galería de arte donde el robot con planificador SAN evita entrar en el espacio de actividad, representado por la trayectoria azul. Crédito:Banisetty et al.
Los robots móviles se están abriendo camino gradualmente en una serie de entornos poblados por humanos, incluidos los hospitales, centros comerciales y casas de la gente. Para que estos robots interactúen con los humanos en su entorno, Deben respetar una serie de normas sociales tácitas asociadas con compartir un entorno determinado con otros.
Teniendo esto en cuenta, investigadores de la Universidad de Nevada, Reno ha desarrollado recientemente un Enfoque de optimización multiobjetivo que podría permitir una navegación socialmente consciente en robots móviles. Este enfoque, descrito por primera vez en un documento presentado en la Conferencia Internacional sobre Robots y Sistemas (IROS) de 2018 y ahora publicado en arXiv, asegura que los robots no invadan el espacio personal de los humanos en su entorno, al mismo tiempo que permite interacciones humano-robot (HRI) más efectivas en varios escenarios.
"Esta investigación comenzó inicialmente como parte de mi trabajo de tesis con robots y niños, "David Feil-Seifer, uno de los investigadores que realizó el estudio, dijo a TechXplore. "El trabajo anterior consistía en desarrollar un robot para entornos en los que queríamos que un robot interactuara con los niños. En este caso, hicimos que el robot tomara la ruta más 'eficiente' según las métricas que se utilizan comúnmente en la planificación de la ruta del robot (minimizando el tiempo para un movimiento, minimizando la distancia recorrida, sin golpear nada) ".
En un estudio anterior publicado en el Revista de interacción humano-robot , Feil-Seifer y sus colegas intentaron desarrollar comportamientos de navegación de robots para entornos poblados por niños. El trabajo piloto demostró que el robot era eficaz para llegar a la ubicación deseada sin golpear nada, pero los investigadores observaron que los niños normalmente reaccionaban mal al robot.
De hecho, el robot utilizado en sus experimentos generalmente se alejaría de los niños y se movería lo más rápido posible hacia la ubicación deseada. Como consecuencia de este comportamiento, los niños pensaron que el robot no quería interactuar con ellos.
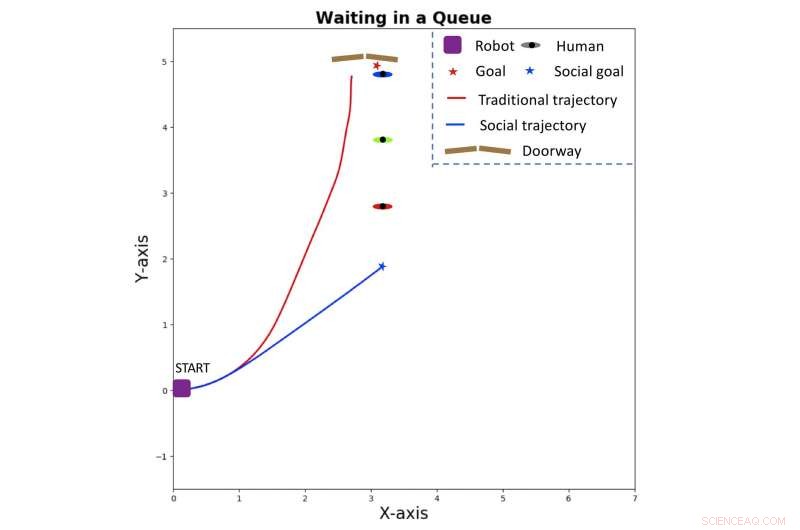
Un robot móvil se une a una señal, formado frente a un escenario de entrada. El planificador tradicional generó la trayectoria roja, guiar al robot a un lugar al lado de la primera persona (inapropiado), cortando la línea. La trayectoria azul nuestro enfoque propuesto, llevando al robot a unirse a la línea (apropiado). Crédito:Banisetty et al.
"Observamos el robot y vimos que en realidad no se movía como lo hace una persona, tomar información social y usarla para ayudar a planificar su ruta, ", Dijo Feil-Seifer." Por lo tanto, decidimos hacer un planificador de navegación que puede usar información de distancia social para ejecutar movimientos socialmente apropiados ".
En el mismo estudio anterior, Feil-Seifer y sus colegas permitieron con éxito que el robot determinara si un movimiento planificado era socialmente apropiado utilizando un método matemático simple llamado modelos de mezcla gaussiana (GMM). Este método funcionó bien en situaciones en las que los factores sociales podían entenderse y representarse fácilmente mediante un modelo matemático lineal simple.
Como la mayoría de las interacciones sociales del mundo real involucran varios factores que son difíciles de encajar en un modelo lineal, sin embargo, el método simple que desarrollaron no se generalizaría bien en diferentes situaciones sociales, y en muchos casos, no funcionaría en absoluto. En su nuevo estudio, los investigadores decidieron así actualizar el planificador que desarrollaron previamente para optimizar los movimientos planificados del robot, teniendo en cuenta las relaciones no lineales entre las diversas propiedades sociales que querían que el robot considerara. Esto implicó el uso de un planificador habilitado para la transformación de eliminación de concavidad de Pareto (PaCcET).
"Las ventajas clave de nuestro enfoque es que puede tomar estas relaciones no lineales entre los diversos factores sociales (es decir, donde estas en un pasillo, dónde te encuentras en relación con otras personas, lo cerca que estás de tu meta, etc.) en cuenta, "Dijo Feil-Seifer.
Feil-Seifer y sus colegas aplicaron su enfoque de optimización no lineal a varios escenarios en los que un robot tenía que respetar las normas sociales, por ejemplo, al no invadir el espacio personal de las personas. Descubrieron que su enfoque funcionaba bien en muchos de estos escenarios, incluyendo interacciones en un pasillo, en una galería de arte o mientras espera una señal.
"Todavía no hemos hecho una comparación directa con otros planificadores de navegación socialmente conscientes; eso está planeado para el futuro, "Feil-Seifer dijo." Sin embargo, en comparación con un planificador tradicional que no considera la dinámica social, el robot le da a una persona mucho más espacio cuando la pasa por el pasillo, al mismo tiempo que continúa avanzando hacia la meta deseada ".
En su estudio reciente, los investigadores evaluaron su enfoque en simulaciones 2-D en un robot PR2 simulado y en el mundo real en un robot móvil pionero-3DX. Sus hallazgos sugieren que su enfoque puede manejar múltiples escenarios de interacción que involucran robots holonómicos y no holonómicos.
"Prácticamente, este artículo inicial demuestra que este método puede funcionar, al menos en un entorno simulado, ", Dijo Feil-Seifer." Trabajos posteriores han demostrado esto en el mundo real y en una amplia gama de escenarios sociales que consideran tanto a otras personas como a factores relacionados con el entorno del robot (es decir, lugares de interés, como cuadros en una pared) que también se relacionan con la conciencia social ".
En general, el trabajo realizado por Feil-Seifer y sus colegas destaca la necesidad de desarrollar herramientas para hacer que los robots sean más conscientes socialmente con el fin de asegurar que no incomoden a las personas y así facilitar su integración en la sociedad. En el futuro, El enfoque de optimización no lineal que desarrollaron podría, en última instancia, simplificar la adopción de robots móviles en las oficinas. hospitales y una variedad de otros entornos.
"Ahora continuamos ampliando las capacidades de nuestro planificador de navegación socialmente consciente (SAN) para incluir una gama más amplia de interacciones sociales para comprender mejor el contexto social de modo que pueda decidir correctamente qué objetivos priorizar, y hacer que el sistema funcione de manera más robusta, ", Dijo Feil-Seifer." También estamos planeando estudiar los efectos directos que la navegación socialmente consciente tiene en las personas que observan la interacción y cómo afecta sus percepciones del robot ". ya que esto ayudaría a validar la necesidad de una navegación socialmente consciente ".
© 2019 Science X Network