Crédito:Universidad de Tecnología de Queensland
Los especialistas en robótica de QUT han desarrollado una forma más rápida y precisa para que los robots agarren objetos, incluso en entornos desordenados y cambiantes, que tiene el potencial de mejorar su utilidad tanto en entornos industriales como domésticos.
El Dr. Jürgen Leitner de QUT dijo que mientras agarrar y levantar un objeto era una tarea básica para los humanos, había resultado increíblemente difícil para las máquinas.
"Hemos podido programar robots, en ambientes muy controlados, para recoger artículos muy específicos. Sin embargo, Una de las deficiencias clave de los sistemas de agarre robóticos actuales es la incapacidad de adaptarse rápidamente al cambio. como cuando se mueve un objeto, "Dijo el Dr. Leitner.
"El mundo no es predecible:las cosas cambian, se mueven y se confunden y, a menudo, Eso sucede sin previo aviso, por lo que los robots deben poder adaptarse y trabajar en entornos muy desestructurados si queremos que sean efectivos. " él dijo.
El nuevo método desarrollado por Ph.D. investigador Douglas Morrison, Dr. Leitner y el distinguido profesor Peter Corke de la Facultad de Ciencias e Ingeniería de QUT, es en tiempo real, método de síntesis de prensión independiente del objeto para la prensión de bucle cerrado.
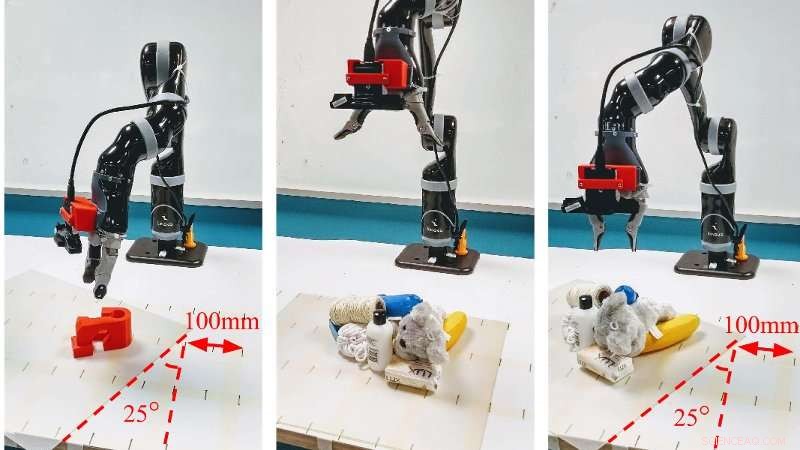
"El enfoque de la red neuronal convolucional de agarre generativo funciona al predecir la calidad y la pose de un agarre con dos dedos en cada píxel. Al mapear lo que está frente a él utilizando una imagen de profundidad en una sola pasada, el robot no necesita probar muchas prensas posibles diferentes antes de tomar una decisión, evitando tiempos de computación prolongados, ", Dijo el señor Morrison.
"En nuestras pruebas del mundo real, Logramos una tasa de éxito de agarre del 83% en un conjunto de objetos nunca antes vistos con geometría contradictoria y del 88% en un conjunto de objetos domésticos que se movieron durante el intento de agarre. También logramos una precisión del 81% al agarrar en un desorden dinámico ".
El Dr. Leitner dijo que el enfoque superó una serie de limitaciones de las técnicas actuales de comprensión de aprendizaje profundo.
"Por ejemplo, en el Amazon Picking Challenge, que nuestro equipo ganó en 2017, nuestro robot CartMan miraría en un contenedor de objetos, tomar una decisión sobre cuál es el mejor lugar para agarrar un objeto y luego entrar a ciegas para intentar levantarlo, " él dijo
"Con este nuevo método, podemos procesar imágenes de los objetos que ve un robot en unos 20 milisegundos, lo que permite al robot actualizar su decisión sobre dónde agarrar un objeto y luego hacerlo con un propósito mucho mayor. Esto es particularmente importante en espacios abarrotados, " él dijo.

Crédito:Universidad de Tecnología de Queensland
El Dr. Leitner dijo que las mejoras serían valiosas para la automatización industrial y en entornos domésticos.
"Esta línea de investigación nos permite utilizar sistemas robóticos no solo en entornos estructurados donde toda la fábrica se construye sobre la base de capacidades robóticas. También nos permite captar objetos en entornos no estructurados, donde las cosas no están perfectamente planificadas y ordenadas, y se requieren robots para adaptarse al cambio.
"Esto tiene beneficios para la industria, desde almacenes para compras y clasificación en línea, hasta la recolección de frutas. También se puede aplicar en el hogar, a medida que se desarrollan robots más inteligentes no solo para aspirar o trapear un piso, sino también para recoger artículos y guardarlos ".
El documento del equipo Cerrando el ciclo para el agarre robótico:un tiempo real, El enfoque de síntesis de agarre generativo se presentará esta semana en Robotics:Science and Systems, la conferencia internacional de robótica más selectiva, que se lleva a cabo en la Universidad Carnegie Mellon en Pittsburgh, EE. UU.