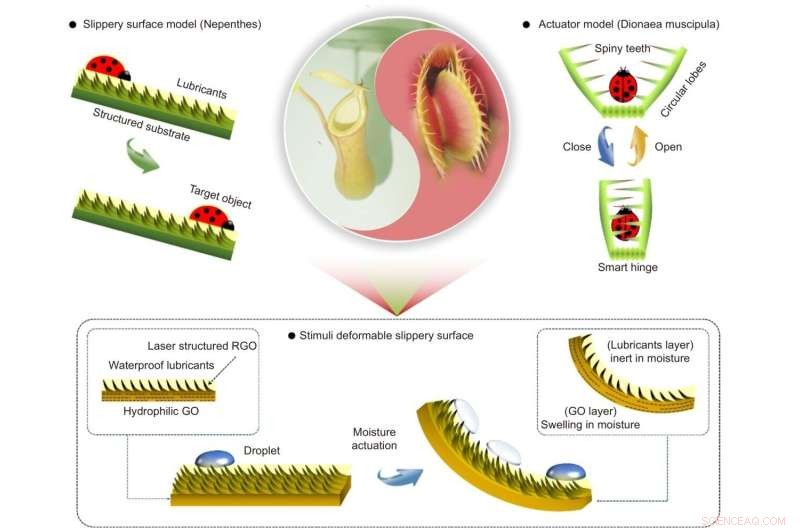
Concepto básico de superficie resbaladiza híbrida biónica sensible a la humedad que se transforma en forma inspirada en plantas carnívoras de múltiples formas. La planta de jarra Nepenthes atrapa insectos de forma pasiva con la ayuda de una superficie resbaladiza infundida con lubricante. La Dionaea muscipula se alimenta activamente a través de un mecanismo de actuación de respuesta a estímulos. Combinamos las superficies resbaladizas (presa pasiva) y la actuación sensible a estímulos (presa activa), por lo que propusimos un GO basado en una superficie resbaladiza deformable por humedad biónica híbrida, que permite la manipulación de gotas tanto activa como pasiva. GO:óxido de grafeno; RGO, GO reducido. Crédito:Compuscript Ltd
Una nueva publicación de Opto-Electronic Advances analiza cómo las plantas carnívoras inspiran superficies resbaladizas inteligentes y robots biónicos.
Las plantas carnívoras han inspirado innovaciones de actuadores avanzados que responden a estímulos y superficies resbaladizas infundidas con lubricante. Sin embargo, el desarrollo de dispositivos biónicos híbridos que combinen las capacidades de captura de presas activas y pasivas de las plantas carnívoras sigue siendo un desafío. El equipo de investigación desarrolló una superficie resbaladiza que cambia de forma y responde a la humedad. Integraron una superficie resbaladiza infundida con lubricante con un actuador bicapa LRGO/GO. El equipo preparó una serie de actuadores de prueba de concepto, que incluyen una lengua de rana inteligente y una flor inteligente, demostrando la captura activa/pasiva, la manipulación de gotas y la detección.
Las plantas carnívoras pueden atrapar y digerir insectos pequeños a través de mecanismos de accionamiento sofisticados o una humectabilidad superficial única. Esta capacidad ha inspirado el desarrollo de superficies/dispositivos inteligentes artificiales para aplicaciones de ingeniería, como superficies antihielo, bioincrustaciones, condensación de gotas y manipulación de gotas. Imitar sus comportamientos de captura ha dado lugar a estrategias innovadoras para diseñar superficies sintéticas, actuadores y robots.
Generalmente, el mecanismo de captura de las plantas carnívoras difiere entre las diferentes especies, las cuales se pueden clasificar en dos categorías:captura activa y captura pasiva. Sin embargo, los dispositivos biónicos híbridos que combinan los méritos de los dos tipos distintos de plantas carnívoras, con capacidades de captura tanto positivas como pasivas, todavía son raros. La combinación de actuadores inspirados en Dionaea muscipula con una superficie resbaladiza que imita la planta de jarra Nepenthes es beneficiosa tanto para el diseño del actuador como para el desarrollo de una superficie inteligente con súper humectabilidad. Sin embargo, es un desafío llegar a este fin.
Femtosecond laser direct writing (FsLDW) induced photoreduction and simultaneous structuring to prepare a GO and LRGO bilayer actuator that enables dynamic deformation under moisture actuation. After that, a lubricant-infused slippery surface was integrated with the graphene actuator by immobilizing lubricant at the LRGO side through the capillary forces.
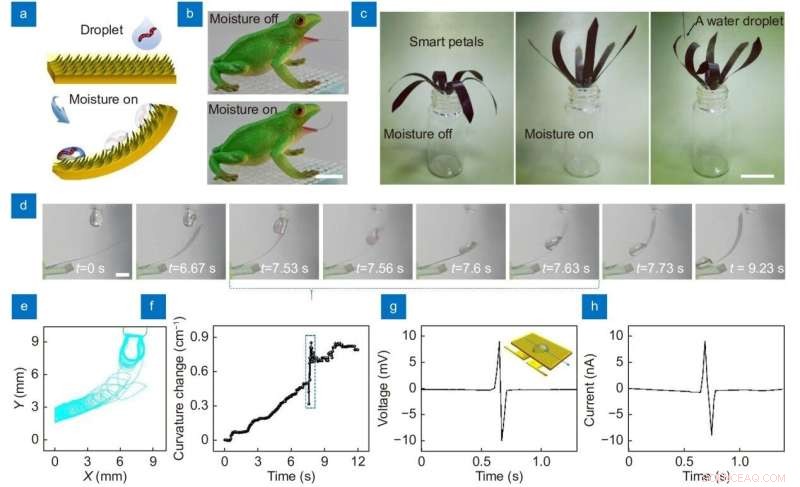
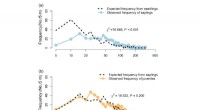
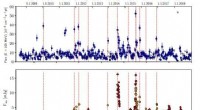
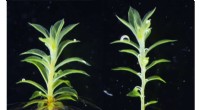
The manipulation of droplets on moisture responsive shape-morphing slippery surface. (a) Schematic illustration for the active and passive manipulation of a droplet containing live tubificidaes using the shape-morphing slippery surface. (b) The photographs of shape-morphing slippery frog tongue. The scale bar is 1.5 cm. (c) A smart water droplet harvesting flower. Every flower petal is made of the shape-morphing slippery surface (oil-LRGO/GO). The scale bar is 1.5 cm. (d) Moisture triggered active approach to water droplets containing live tubificidaes and the passive sliding behavior on the shape-morphing slippery surface. The scale bar is 0.5 cm. (e) The corresponding trajectory of the water droplet peripheries during the dynamic process. (f) The curvature changes of the shape-morphing slippery surface in (d). (g) The open-circuit voltage and (h) short-circuit current. Crédito:Compuscript Ltd
The two types of carnivorous plants demonstrate distinct strategies for trapping prey. Nepenthes pitcher plants catch insects through a passive trapping mechanism with the help of lubricants-infused slippery surfaces. In contrast, Dionaea muscipula performs an active trapping behavior through a sophisticated actuating mechanism. The concept of the hybrid bionic model is the combination of the two tapping behaviors within one synthetic smart surface here, which the research team called a stimuli deformable slippery surface.
Traditional stimuli-responsive actuators enable reversible deformation under external stimuli. They reveal the great potential for developing trapping robots. However, in most cases, simple bending deformation cannot trap insects because of the slow response to environmental stimuli or the lack of surface wettability control. The team combined the moisture-responsive actuator with a lubricant-infused slippery surface together. The combined effect of actuation and slippery property endows the oil-infused LRGO/GO film with enhanced trapping ability.
The research team demonstrated a moisture-responsive shape-morphing slippery surface that can contact droplets actively and let them slide away passively. Based on this hybrid bionic concept, a smart frog tongue that can catch and manipulate droplets containing live tubificidaes is prepared. Notably, the slippery surface can bend under moisture actuation, get in touch with the droplet, and let it slide to the bottom, demonstrating both active catching and passive trapping capabilities.
In conclusion, the in-situ integration of the lubricant-infused slippery surface with the bilayer actuator does not degrade the actuating performance. It also improves its deformation degrees under moisture actuation. The presence of an oil layer can entirely prevent the transmission of water molecules through the LRGO side, and selective water adsorption only occurs within the GO layer. As a result, the oil-LRGO/GO actuator demonstrated large deformation curvature, short response/recovery time, and improved stability. For practical applications, laser interference ablation that uses an interference effect for periodical patterning is more effective. The significance of this work lies in the fabrication of a shape-morphing slippery surface with hybrid bionic functionalities of both stimuli-responsive deformation and oil-lubricated slippery properties.
The combination of shape-morphing ability with the slippery surface benefits both actuating performance and the usefulness of a smart surface with super wettability. It leads to new applications, such as droplet collection, manipulation, and rainfall sensing. Moisture-responsive actuators can directly harness energy from naturally occurring or engineered evaporation from water. That can subsequently be converted to mechanical energy or electricity, such as weather-responsive architectural systems, smart textiles, and soft robots. The cross-species bio-inspired materials benefit both actuator design and the development of smart surfaces with super wettability. The moisture-responsive shape-morphing slippery surface reveals great potential for developing bionic robots. Liquid-infused slippery surface performs better than superhydrophobic surface in long-term corrosion resistance