 Optimus Prime en forma bípeda, de la película "The Transformers". Ver más imagenes de robots . Imagen © 2007 Dreamworks Pictures
Optimus Prime en forma bípeda, de la película "The Transformers". Ver más imagenes de robots . Imagen © 2007 Dreamworks Pictures Sin duda, el personal de HowStuffWorks está ansioso por la próxima película "Transformers". No solo nos preguntamos si será bueno. Nos preguntamos si veremos robots con las capacidades de Transformers durante nuestras vidas. Si bien los Transformers a gran escala parecen un poco inverosímiles y poco prácticos, resulta que algunos robots existentes tienen mucho en común con Transformers. En este articulo, exploraremos cómo se ven estos robots transformadores, cómo funcionan y en qué se parecen a Transformers como Optimus Prime.
Comenzaremos con un análisis del propio Prime. Es enorme e impresionante pero ¿podría alguna vez ser real? Descubrir, Le preguntamos al ingeniero Michael D. Belote qué se necesitaría para construir un tractor-remolque a gran escala que se pueda convertir en un robot bípedo. En otras palabras, ¿Qué se necesitaría para hacer una versión a tamaño real de Optimus Prime?
Primero, Prime tiene que ser un robot auto reconfigurable . Algunos robots que se reconfiguran a sí mismos, o robots que pueden cambiar sus formas para realizar diferentes tareas, existen hoy. Sin embargo, son muy diferentes de Optimus Prime. Como explica Belote:
Con robots auto reconfigurables, el ingeniero normalmente prefiere mantener al individuo, módulos móviles pequeños, sencillo, barato, e intercambiable; en el caso de Optimus Prime, sin embargo, se trata de un robot cuyos módulos individuales son tan grandes como la cabina de un camión. Incluso si la construcción de tales módulos fuera posible, el gasto sería desorbitado, y la extraordinaria complejidad haría prácticamente imposible que todos los sistemas funcionen correctamente juntos.Si los ingenieros descubrieron cómo hacer módulos intercambiables en la escala de Optimus Prime, todavía podría ser imposible proporcionar el poder para moverlos. En su forma de vehículo, Optimus Prime puede funcionar con combustible diésel ordinario. Pero caminar es mucho menos eficiente que rodar sobre ruedas. Para caminar Prime necesitaría mucha más potencia de la que podría proporcionar un motor diesel. Aquí está el análisis de Belote sobre cómo manejar los requisitos de energía de Prime:
Los robots tradicionales se basan en una de tres fuentes de energía:eléctrica, neumático, o hidráulica. Debido a los pesos extremos involucrados, La potencia hidráulica es la fuente más probable de Prime, porque los actuadores hidráulicos proporcionan relaciones de potencia / peso muy altas (gran potencia de salida para pequeñas entradas de potencia).Entonces, la energía hidráulica podría permitirle a Prime caminar, pero el propio sistema hidráulico crearía un conjunto diferente de problemas. "Se debe agregar un tanque o depósito para contener el fluido hidráulico, "dice Belote, "Las bombas hidráulicas son necesarias; se debe usar una fuente de energía secundaria para alimentar la bomba; las válvulas son necesarias para cumplir con las presiones y tasas de flujo adecuadas". Además, un Prime de propulsión hidráulica tendría que estar revestido con tuberías para transportar el fluido hidráulico. Estos tubos junto con las líneas de combustible y el cableado eléctrico de Prime, tendría que permanecer intacto o incluso intacto durante la transformación.
Después de sobrevivir a la transformación a forma de robot, Prime tendría que caminar como un bípedo. Belote describe lo que se necesitaría para que esto sucediera:dado que las semifinales tradicionales con frecuencia superan las 30 toneladas de peso, el peso final de Prime podría fácilmente estar en el rango de 35 a 40 toneladas. Compare esto con el mejor robot "ambulante" del mundo, El robot ASIMO de Honda, que tiene un peso total de 119 libras y, sin embargo, solo puede caminar unos 40 minutos (alimentado eléctricamente) y a una velocidad máxima de menos de 2 mph. La relación de peso para ASIMO es de 2,3 libras por pulgada, en comparación con la relación de peso de Prime, que probablemente excedería de 75 a 80 libras por pulgada, un aumento de treinta veces.
Además, los robots no pueden imitar fácilmente el movimiento de caminar. "Con un robot, "Belote explica, "hay un comando directo (levantar la pierna 'x' cantidad, inclinarse hacia adelante 'y' cantidad, extender la pierna hacia abajo cantidad 'z', etcétera). Con los humanos, sin embargo, no hay un mecanismo de "retroalimentación":su cerebro no se comunica constantemente con sus piernas sobre dónde debe colocarse. En lugar de, simplemente te inclinas hacia adelante y 'caes, "configurar la pierna para que absorba el impacto cuando el pie entra en contacto con el suelo".
Por lo tanto, no es probable que podamos ver un Optimus Prime o un robot como él en nuestras vidas. Pero ya existen robots que pueden cambiar de forma o adoptar cualquier forma. Veremos algunos de ellos, y cómo se comparan con Prime, en la siguiente sección.
Contenido
 Optimus Prime puede ser tanto un robot bípedo como un semirremolque. Imagen © 2007 Dreamworks Pictures
Optimus Prime puede ser tanto un robot bípedo como un semirremolque. Imagen © 2007 Dreamworks Pictures Lo mejor de Transformers, por supuesto, es que pueden tomar dos formas completamente diferentes. La mayoría pueden ser robots bípedos o vehículos de trabajo. En cambio, algunos pueden transformarse en armas o dispositivos electrónicos. Las dos formas de un Transformer tienen fortalezas y capacidades muy diferentes.
Esto es completamente diferente a la mayoría de los robots reales, que generalmente solo son buenos para realizar una tarea o algunas tareas relacionadas. Los vehículos de exploración de Marte, por ejemplo, puede hacer lo siguiente:
 Representación de un artista de un vehículo de exploración de Marte en la superficie de Marte Imagen cortesía de NASA
Representación de un artista de un vehículo de exploración de Marte en la superficie de Marte Imagen cortesía de NASA Un Exploration Rover no sería muy bueno en tareas que no encajan en estas categorías. No puede por ejemplo, montar un puente, encajar en espacios muy pequeños o construir otros robots. En otras palabras, sería un pésimo robot de búsqueda y rescate, y no encajaría en absoluto en una fábrica automatizada.
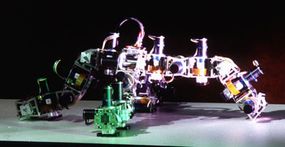
 Snakebot de la NASA es un ejemplo de un robot de cadena. Imagen cortesía de NASA
Snakebot de la NASA es un ejemplo de un robot de cadena. Imagen cortesía de NASA 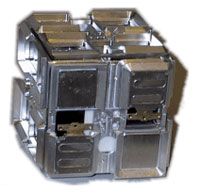 Un módulo Telecube G2 Imagen cortesía de Palo Alto Research Center Incorporated
Un módulo Telecube G2 Imagen cortesía de Palo Alto Research Center Incorporated Por eso los ingenieros están desarrollando reconfigurar robots . Como Transformers, estos robots pueden cambiar su forma para adaptarse a la tarea en cuestión. Pero en lugar de cambiar de una forma a otra, como un robot bípedo a un tractor-remolque, La reconfiguración de robots puede adoptar muchas formas. Son mucho más pequeños de lo que serían los Transformers reales; algún robot reconfigurador modulos son lo suficientemente pequeños como para caber en la mano de una persona.
Un módulo es esencialmente un pequeño robot relativamente simple o pieza de un robot. Los robots modulares están hechos de muchos de estos pequeños, módulos idénticos. Un robot modular puede constar de algunos módulos o de muchos, dependiendo del diseño del robot y la tarea que necesita realizar. Algunos robots modulares existen actualmente solo como simulaciones por computadora; otros se encuentran todavía en las primeras etapas de desarrollo. Pero todos operan con el mismo principio básico:muchos pequeños robots pueden combinarse para crear uno grande.
Los módulos no pueden hacer mucho por sí mismos. Un sistema de reconfiguración también debe tener:
Más modular, La reconfiguración de los robots encaja en una de tres categorías:cadena, Celosía y configuración modular. Robots de cadena son cadenas largas que pueden conectarse entre sí en puntos específicos. Dependiendo del número de cadenas y de dónde se conectan, estos robots pueden parecerse a serpientes o arañas. También pueden convertirse en bucles rodantes o bípedos, robots andantes. Un conjunto de cadenas modulares podría sortear una carrera de obstáculos arrastrándose a través de un túnel como una serpiente, cruzar un terreno rocoso como una araña y montar un triciclo por un puente como un bípedo.
Ejemplos de robots de cadena son Polybot y Polypod del Palo Alto Research Center (PARC) y Snakebot de la NASA. La mayoría necesita un ser humano o En teoria, otro robot, para asegurar manualmente las conexiones con tornillos.
Robots simulados
Las simulaciones por computadora son una parte vital de la investigación en robótica, particularmente con la reconfiguración de robots. Los científicos usan computadoras para averiguar cómo se moverán los módulos en relación con otros antes de enseñar a los módulos cómo hacerlo. En algunos casos, las simulaciones por ordenador existen mucho antes que los robots reales. El Laboratorio de Robótica Rus del Instituto Tecnológico de Massachusetts (MIT) tiene numerosas simulaciones de cómo se mueven estos robots.
 Los módulos de moléculas de Rus Robotics Laboratory cuentan con dos cubos conectados en un ángulo de 90 grados. Una superficie de cada cubo alberga el enlace que lo conecta con la otra mitad del módulo. Las otras cinco superficies se pueden unir a otros módulos. Imagen cortesía de Keith Kotay / Rus Robotics Laboratory
Los módulos de moléculas de Rus Robotics Laboratory cuentan con dos cubos conectados en un ángulo de 90 grados. Una superficie de cada cubo alberga el enlace que lo conecta con la otra mitad del módulo. Las otras cinco superficies se pueden unir a otros módulos. Imagen cortesía de Keith Kotay / Rus Robotics Laboratory La idea básica de un robot de celosía es que enjambres de pequeños, módulos idénticos que pueden combinarse para formar un robot más grande. Ya existen varios prototipos de robots de celosía, pero algunos modelos existen solo como simulaciones por computadora. Los robots de celosía se mueven arrastrándose unos sobre otros, conectar y desconectar puntos de conexión en robots vecinos. Es como la forma en que las fichas se mueven en un rompecabezas deslizante. Este método de movimiento se llama reconfiguración del sustrato - los robots pueden moverse solo a lo largo de puntos dentro del entramado de robots. Los módulos de celosía pueden tener fuentes de alimentación autónomas, o pueden compartir fuentes de energía a través de sus conexiones a otros módulos.
Los robots de celosía pueden moverse sobre terrenos difíciles trepando unos sobre otros, siguiendo la forma del terreno, o pueden formar un sólido, Superficie estable para soportar otras estructuras. Suficientes robots de celosía pueden crear casi cualquier forma. Las simulaciones por computadora los muestran cambiando de una pila de piezas a una taza de té y de un perro a un sofá. Los módulos se pueden combinar para hacer superficies planas, escaleras apéndices móviles y prácticamente cualquier otra forma imaginable. Entonces, un robot de celosía se parece más a un Terminator T-1000 que a un Transformer.
Los laboratorios de robótica han creado y teorizado varios sistemas de robots de celosía:
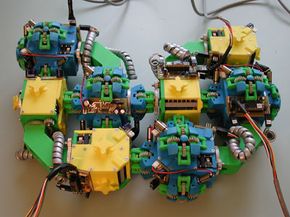
 Los swarm-bots pueden maniobrar de forma independiente, o pueden combinarse para completar tareas que no podrían realizar solos. Imagen cortesía del profesor Marco Dorigo
Los swarm-bots pueden maniobrar de forma independiente, o pueden combinarse para completar tareas que no podrían realizar solos. Imagen cortesía del profesor Marco Dorigo Como robots de celosía, robots de reconfiguración móviles son pequeños, módulos idénticos que pueden combinarse para formar robots más grandes. Sin embargo, no necesitan la ayuda de sus vecinos para ir de un lugar a otro; pueden moverse por su cuenta. Los robots de configuración móvil son muy parecidos a dibujos animados de bancos de peces o bandadas de pájaros que se combinan para crear una herramienta o estructura. Se mueven de forma independiente hasta que necesitan unirse para realizar una tarea específica. Enjambre-bots , un proyecto del programa Tecnologías Futuras y Emergentes de la Unión Europea, son robots de reconfiguración móviles.
Aunque estos robots se ven muy diferentes entre sí, tienen muchas similitudes en cómo se mueven y operan. Los veremos a continuación.
Un transformador realmente realLos transformadores no son necesariamente prácticos o incluso posibles a gran escala. Pero los ingenieros de Himeji Soft Works han desarrollado un robot a pequeña escala que realmente pasa de ser un automóvil a un bípedo y viceversa. Puedes ver un video de este robot, incluyendo su transformación, en YouTube.
 Los transformadores son conscientes de sí mismos y pueden tomar decisiones por sí mismos. pero sus partes móviles no son autónomas. Imagen © 2007 Dreamworks Pictures
Los transformadores son conscientes de sí mismos y pueden tomar decisiones por sí mismos. pero sus partes móviles no son autónomas. Imagen © 2007 Dreamworks Pictures Además de su tamaño y estructura modular, Los robots que se reconfiguran a sí mismos son diferentes de los Transformers en una forma importante. Optimus Prime y otros Transformers son conscientes de sí mismos y pueden tomar decisiones independientes. y mantienen sus cerebros en un lugar dentro de sus cuerpos. El cerebro de un transformador controla cada una de sus partes móviles, y las partes en sí tienen poca o ninguna autonomía.
En la mayoría de las configuraciones de robots modulares, aunque, cada módulo tiene cierto poder de toma de decisiones y ayuda a determinar hacia dónde se moverá. En lugar de que un módulo sea el jefe de todos los demás, las capacidades de planificación y movimiento son repartido en todos los módulos.
Esta idea - un enjambre de pequeños robots, cada uno de los cuales decide a dónde irá, puede sonar desastroso. Pero los módulos están programados con un conjunto de reglas basadas en geometría sobre cómo moverse. También están programados con algoritmos que gobiernan su movimiento. Estos algoritmos y reglas permiten a los robots descubrir cómo cambiar de una forma a otra y moverse por el terreno.
Para maniobras muy complejas, en cambio, los robots planean una serie de sub-formas en lugar de intentar hacer un cambio importante en un solo paso. Por ejemplo, un robot de celosía que necesita cambiar de una pila aleatoria de módulos a un robot bípedo podría formar primero las piernas. Luego, podría usar esas patas como andamio para construir la mitad superior del robot.
 En la actualidad, cada sistema de robot modular tiene sus propias reglas para gobernar cómo se mueve y se reconfigura. Imagen cortesía de Palo Alto Research Center Incorporated
En la actualidad, cada sistema de robot modular tiene sus propias reglas para gobernar cómo se mueve y se reconfigura. Imagen cortesía de Palo Alto Research Center Incorporated En este momento, muchos de estos robots pueden realizar transiciones simples de una forma a otra por sí mismos. Los cambios más complejos pueden requerir la ayuda de un científico, haciendo que la colección de robots sea semiautónoma en lugar de autónoma. Algunos robots que aún se encuentran en las primeras etapas de desarrollo reciben toda su instrucción desde una estación de trabajo de computadora y no toman decisiones por sí mismos.
En la actualidad, la mayoría de los robots de reconfiguración tienen su propio sistema de reglas y algoritmos, y los conjuntos de reglas funcionan solo para los robots para los que fueron diseñados. En otras palabras, las reglas para Crystal del Laboratorio de Robótica Rus no funcionarán con Molecule.
Sin embargo, Los científicos están utilizando simulaciones por computadora para investigar teorías de movimiento que podrían funcionar independientemente de cómo se vea un módulo robótico. Estas teorías podrían establecer reglas básicas para el movimiento de los robots, incluso:
Si tiene éxito, esta investigación podría facilitar a los ingenieros la creación de nuevos robots modulares de trabajo que siguen las mismas reglas de movimiento.
Aunque estos robots no caminan y hablan como lo hacen los Transformers, pueden cambiar a prácticamente cualquier forma, dada la programación y las instrucciones correctas. Para obtener más información sobre ellos y sobre Transformers, vea los enlaces en la página siguiente.
¿Dónde guardan los transformadores sus cerebros?
Mientras trabajaba en este artículo, el personal de HowStuffWorks tuvo una animada discusión sobre dónde guardan sus cerebros los Transformers. Todos intuimos la misma respuesta:el cerebro de un Transformer debe estar en su cabeza (o en su cabina en forma de vehículo). Muchas representaciones de cómics y dibujos animados parecen apoyar esta idea. Sin embargo, no explica por completo cómo las partes de Optimus Prime pueden funcionar por separado, a menos que Prime use señales de radio o infrarrojos para enviar y recibir comandos. Tampoco explica del todo por qué las personalidades de Constructicons son diferentes de las de su componente Transformers. Puedes leer más sobre los cerebros de Transformers y cómo funcionan en The Matrix, una revista no oficial de Transformers.
Fuentes














