Trituradora de vehículos terrestres no tripulados Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica
Trituradora de vehículos terrestres no tripulados Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica Crusher hizo su debut en un verdadero estilo de camión monstruo:los dos prototipos entraron en un edificio de la Universidad Carnegie Mellon con música a todo volumen y luces intermitentes. One Crusher se quedó parado mientras su contraparte procedía a rodar y aplastar montones de autos que harían retroceder a la mayoría de los camiones monstruo con la cola entre las piernas. La trituradora no es un camión típico. Puede conducir directamente sobre una pared vertical de 4 pies mientras lleva 8, 000 libras de carga.
La trituradora es una vehículo terrestre no tripulado ( UGV ) financiado por DARPA y diseñado por el Centro Nacional de Ingeniería Robótica de Carnegie Mellon ( NREC ). El impulso del proyecto Crusher, que se basa en otro UGV diseñado por NREC llamado Spinner (Crusher a veces se llama Spinner versión 2.0 ) - es prácticamente el impulso de toda la investigación y el desarrollo financiados por militares en el mundo UGV en este momento:mayores capacidades de percepción, autonomía y robustez. Al ejército de los EE. UU. Le gustaría pocas cosas más que un tanque silencioso que puede transportar una carga útil ilimitada, defenderse del enemigo y acelerar sin restricciones a través de un terreno que haría que el Hummer se acurrucara en posición fetal.
La trituradora probablemente nunca verá una producción en masa. El costo sería demasiado alto (los diseñadores ni siquiera citan un número). Está diseñado como un prototipo funcional para probar varias tecnologías que el NREC está desarrollando como parte de un programa llamado UPI .
UPI significa U Vehículo de combate terrestre tripulado PAG erceptOR (todoterreno) I integración un bocado financiado por DARPA que abarca experimentos para "evaluar las capacidades de gran escala, vehículos terrestres no tripulados (UGV) que operan de forma autónoma en una amplia gama de complejos, terrenos todoterreno "[ref]. La trituradora de 6.5 toneladas pesa casi un 30 por ciento menos que la Spinner y puede transportar más carga. Lo único que el NREC dejó fuera de la actualización de Spinner es la capacidad de seguir en camión si se voltea al revés . No se sabe por qué desapareció esa función genial, aunque la lógica sugeriría que fue para hacer posibles algunas de las otras funciones mejoradas de Crusher o para reducir una capacidad de alto costo que puede no ser crucial para la misión principal de UPI.
Entonces, ¿Qué puede hacer Crusher?
 Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica
Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica Según el NREC, La tecnología de Crusher es de seis a 10 años desde la implementación en el mundo real. Aunque más pequeño, Los robots controlados por humanos ya han llegado al campo de batalla (ver Cómo funcionan los robots militares), masivo, Los robots no tripulados como Crusher todavía están en los laboratorios. La complejidad de los sistemas de percepción y control necesarios para que un robot a gran escala maneje terrenos y condiciones desconocidos aún se encuentra en la etapa de investigación y desarrollo. Los sistemas de percepción y navegación de Crusher son prototipos pensados como plataformas de prueba para enfoques cada vez más innovadores de vehículos de combate terrestres que no requieren intervención humana para llevar a cabo su misión.
En la siguiente sección, echaremos un vistazo a algunos de esos sistemas. Dado que Crusher es ante todo un proyecto militar, los detalles completos no están disponibles para el público en general, pero HowStuffWorks ha logrado, no obstante, encontrar información interesante.
 Prototipos de trituradoras Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica
Prototipos de trituradoras Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica Hay tres áreas de enfoque principales en el desarrollo de Crusher:
El esqueleto de la trituradora está hecho de aluminio y titanio. Su casco es un marco espacial de aluminio (una estructura abierta de bielas) con nodos de titanio ultrarresistentes que se unen a las bielas para mayor resistencia en el probable caso de colisiones con grandes, objetos duros. Inmediatamente debajo del casco hay una placa de deslizamiento, básicamente una suspensión, "parachoques" de acero amortiguado que se erige como una primera defensa, proteger el casco del contacto inicial con rocas como rocas, tocones y escalones de árboles.
 Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica
Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica Para mantenerlo en movimiento sobre obstáculos y terrenos generalmente hostiles, Crusher tiene seis ruedas sistema de tracción total impulsado por un híbrido diesel-eléctrico configuración que permite un funcionamiento casi silencioso, una característica útil en el trabajo de reconocimiento. 78 caballos de fuerza, El motor turbodiésel actúa como generador en el sistema, dando salida a 58 kilovatios (kW) continuos de potencia para cargar los 300 voltios de Crusher, 18,7 kW, paquete de baterías de iones de litio. Las baterías, a su vez, hacen funcionar seis motores eléctricos de 210 kW, uno situado en cada uno de los seis cubos de rueda. Cada motor produce 282 caballos de fuerza. Como la mayoría de los sistemas eléctricos híbridos, Crusher utiliza el frenado regenerativo para devolver algo de energía a las baterías cada vez que reduce la velocidad (consulte Cómo funcionan los automóviles híbridos para obtener información sobre el frenado regenerativo). El vehículo puede funcionar solo con la energía silenciosa de la batería durante 2 a 10 millas (3 a 16 km) dependiendo de la velocidad y la carga de carga.
Dado que cada rueda se acciona de forma independiente, si uno o dos mueren, La trituradora puede seguir funcionando. Solo necesita cuatro de las seis ruedas para mantener sus capacidades. Y si se encuentra en la necesidad repentina de un cambio de rumbo, digamos, rodeado por tres lados por barreras infranqueables, puede usar su capacidad de dirección deslizante , un radio de giro de cero, para dar media vuelta rápidamente sin ningún margen de maniobra.
Para caber debajo de obstáculos colgantes bajos, enfrentarse a un terreno rocoso o mejor esconderse del enemigo, La trituradora tiene una altura de manejo ajustable de cero a 30 pulgadas (76 cm). Además del ajuste de altura, La suspensión de la trituradora puede viajar 30 pulgadas completas para absorber los golpes, y cuenta con rigidez ajustable para diferentes condiciones del suelo. Pudimos ubicar una vista debajo del capó de Spinner, El predecesor de Crusher:recuerde que Crusher es una versión mejorada de Spinner 1.0:
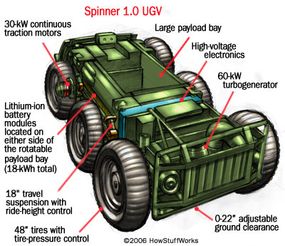 La trituradora presenta mejoras en el ajuste de la altura de manejo, recorrido de suspensión, peso del vehículo y capacidad de carga.
La trituradora presenta mejoras en el ajuste de la altura de manejo, recorrido de suspensión, peso del vehículo y capacidad de carga. El poderoso marco de la trituradora, La configuración de tracción en las seis ruedas y las capacidades de suspensión extremas permiten que el UGV viaje a altas velocidades, actualmente hasta 42 kph (26 mph), sobre terrenos difíciles, enfrentando obstáculos como zanjas, cantos rodados pendientes pronunciadas y barreras verticales de hasta 4 pies, todo sin perder el ritmo.
Robustez, el poder y el silencio hacen de Crusher una herramienta de exploración ideal, pero es principalmente el sistema de autonomía de UGV que DARPA ha desembolsado hasta ahora $ 35 millones para desarrollar. El NREC no ha publicado mucha información detallada sobre el sistema UPI, pero dice que "esta tecnología extiende las capacidades de detección en todo el vehículo para ayudar a equilibrar su percepción y también respaldar las áreas del vehículo que pueden ser menos hábiles para detectar el entorno. El software [de detección] también permitirá que Crusher 'aprenda' y aplique información previamente recopilada a nuevos obstáculos ".
Sabemos que el hardware de percepción consiste principalmente en LADAR (detección y rango de láser) unidades y matrices de cámaras . Una unidad LADAR envía un rayo láser para escanear un área y mide cuánto tiempo tarda el rayo en reflejarse de regreso al sensor láser de la unidad. Crusher tiene ocho de estas unidades:cuatro escanean el entorno horizontalmente y cuatro escanean verticalmente. Utiliza seis pares de cámaras de visión estéreo para la percepción de profundidad y cuatro cámaras de color para aplicar un píxel de color a cada punto de distancia determinado por el sensor LADAR.
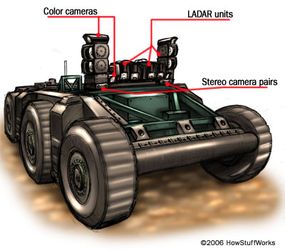 Versión inicial del sistema de percepción de Crusher
Versión inicial del sistema de percepción de Crusher La encarnación más reciente de Crusher presenta un mástil telescópico para recopilar datos desde un punto de vista superior. El mástil puede incorporar partes del conjunto de cámara y LADAR que se ven arriba, o simplemente puede agregar un conjunto adicional de sensores al sistema de percepción.
 Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica
Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica Con todos los datos de la cámara y LADAR combinados, Trituradora CPU integrada crea una imagen tridimensional del paisaje en el que viaja Crusher. La CPU es un Pentium 3 de 700 MHz que controla las actividades mecánicas de Crusher y ejecuta el software de navegación que maneja el procesamiento de datos de los sensores. Un unidad de medida Inercial ( IMU ) detecta la altitud de la trituradora, posición y dirección del movimiento mediante una combinación de acelerómetros (sensores de inclinación) y giroscopios, por lo que Crusher siempre es consciente de su propio movimiento y posición en relación con el paisaje. El UGV también tiene un receptor GPS incorporado y una base de datos GPS basada en computadora que incluye datos de terreno preprogramados.
Hasta aquí, Los experimentos de campo han demostrado que Crusher está bien encaminado hacia la verdadera autonomía. En prueba, La trituradora se movió de un punto de referencia GPS a otro con una separación de más de 1 km (0,6 millas) sin ningún control externo. Utilizando sus sistemas de percepción y navegación, La trituradora puede reaccionar a los obstáculos sobre la marcha; no necesita que un operador le diga qué hacer cuando golpea algo. Puede subir una pendiente superior a 40 grados, conduzca derecho sobre un escalón de 4 pies y cruce una zanja de 80 pulgadas usando sus propias capacidades de toma de decisiones. La capacidad de cruzar trincheras es especialmente interesante:las llantas de Crusher están montadas de tal manera que pueden caer para sostener el vehículo mientras cruza una brecha.
 Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica
Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica Especificaciones de la trituradora :
Las especificaciones de tamaño y peso significan que un solo avión de carga C-130H puede llevar dos trituradoras a la batalla en cualquier parte del mundo. En agosto de 2006, Crusher ha sido equipado con una montura Rafael Mini Typhoon que sostiene un rifle calibre .50, apuntando a la posibilidad de que los roles de combate puedan convertirse en un foco cada vez más prominente en el desarrollo de tecnología de autonomía para vehículos militares. En la siguiente sección, Echaremos un vistazo al futuro del prototipo Crusher y descubriremos cómo encaja con la tendencia general en investigación y desarrollo militar.
 Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica
Foto cortesía de Carnegie Mellon, Centro Nacional de Ingeniería Robótica A partir de 2006, el ejército de los EE. UU. ha desplegado aproximadamente 4, 000 robots de batalla para el servicio activo. Los militares utilizan estos robots principalmente para "olfatear" bombas y limpiar edificios y otras estructuras cerradas. El ejercito Futuros sistemas de combate ( FCS ) está buscando gastar alrededor de $ 300 millones para financiar actualizaciones para expandir las funciones de los robots en el campo de batalla. El FCS busca mulas robóticas que puedan transportar carga junto a las tropas en terrenos irregulares y vehículos no tripulados mucho más grandes que puedan operar sin intervención humana para explorar áreas y patrullar fronteras. enviar datos cruciales a las tropas. Si estos grandes, Los vehículos autónomos también pueden transportar enormes cargas útiles en terrenos difíciles sin perder velocidad, eso sería una ventaja adicional. Trituradora o algo así sería ideal en los últimos roles.
La propia trituradora probablemente no verá el despliegue. Es principalmente un proyecto de investigación y estará en pruebas y experimentación hasta 2008. En ese momento, el NREC entregará la tecnología Crusher a DARPA para que pueda ser aplicada a proyectos relacionados, la mayoría de los cuales caen bajo el dominio del Future Combat System. El FCS está ejecutando programas de desarrollo como el Vehículo de reconocimiento armado (ARV), que tiene como objetivo realizar una plena autonomía, vehículo listo para la batalla para misiones de reconocimiento; y el Sistema de Navegación Autónoma (ANS), un programa general para desarrollar capacidades de autonomía de plataforma común para una amplia gama de robots militares. El objetivo general de FCS es la integración perfecta de vehículos tripulados y no tripulados, tierra y aire, en una estructura que se puede gestionar a través de un único, sistema de control similar a una web.
A través de FCS, es posible que veamos vehículos tipo Crusher apoyando a las tropas en las operaciones de batalla en cinco a diez años. Lo más probable es que comiencen en roles de reconocimiento y luego hagan la transición al combate, apoyar a las tropas en lugar de reemplazarlas. Pero la tecnología de autonomía de vanguardia de Crusher no es específica de militares. El NREC prevé, y tiene en proceso, proyectos de investigación que utilizan los sistemas desarrollados para Crusher en aplicaciones civiles. En una década pudimos ver vehículos autónomos realizando tareas de riesgo en áreas como la agricultura, minería y construcción, en última instancia, transfiere parte del peligro que enfrentan los humanos en estos campos a contrapartes robóticas reemplazables que no sienten dolor.
Para obtener más información sobre Crusher, UGV y temas relacionados, consulte los enlaces en la página siguiente.
Fuentes