Crédito:Rui Wang, Instituto de Automatización, Academia China de Ciencias
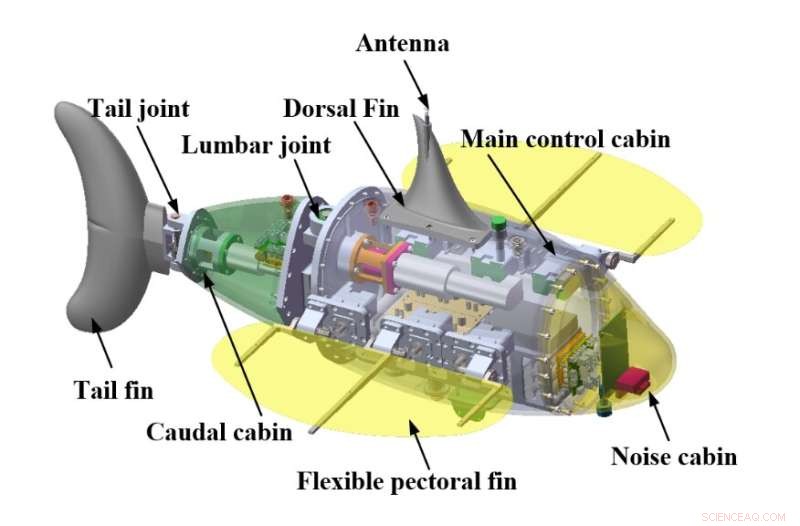
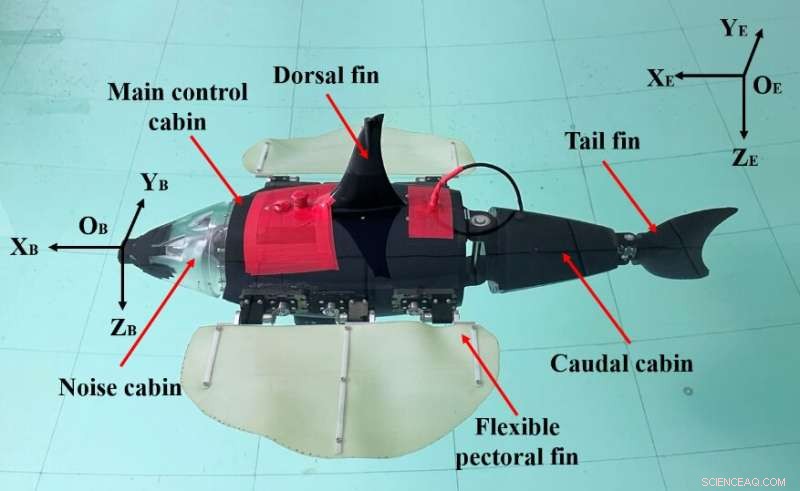
Los robots submarinos se utilizan ampliamente como herramientas en una variedad de tareas marinas. El RobDact es uno de esos vehículos submarinos biónicos, inspirado en un pez llamado Dactylopteridae conocido por sus aletas pectorales agrandadas. Un equipo de investigación ha combinado la dinámica de fluidos computacional y un experimento de medición de fuerza para estudiar el RobDact, creando un modelo hidrodinámico preciso del RobDact que les permite controlar mejor el vehículo.
El equipo publicó sus hallazgos en Cyborg and Bionic Systems el 31 de mayo de 2022.
Los robots submarinos ahora se utilizan para muchas tareas marinas, incluso en la industria pesquera, la exploración submarina y el mapeo. La mayoría de los robots submarinos tradicionales son impulsados por una hélice, que es eficaz para navegar en aguas abiertas a una velocidad estable. Sin embargo, los robots submarinos a menudo necesitan poder moverse o flotar a baja velocidad en aguas turbulentas, mientras realizan una tarea específica. Es difícil que la hélice mueva el robot en estas condiciones. Otro factor cuando un robot submarino se mueve a baja velocidad en aguas inestables que fluyen es el movimiento de "contracción" de la hélice. Esta contracción genera pulsos de fluido impredecibles que reducen la eficiencia del robot.
En los últimos años, los investigadores han trabajado para crear robots submarinos que imitan a los seres vivos. Estos vehículos biónicos se mueven por el agua de forma similar a como se mueven los peces o las mantarrayas. En comparación con los vehículos de propulsión submarina tradicionales, estos vehículos subacuáticos biónicos funcionan de manera más eficiente y robusta en el agua, a la vez que son respetuosos con el medio ambiente.
Crédito:Rui Wang, Instituto de Automatización, Academia China de Ciencias
Los robots submarinos se ven afectados por el fluido circundante a medida que se mueven por el agua. Este fenómeno se llama efecto hidrodinámico. Mientras se mueve en el agua, el robot debe lidiar con un flujo y una fuerza de agua desconocidos, lo que puede causar cambios innecesarios en la posición del robot.
Para controlar mejor el robot, los investigadores necesitan un modelo hidrodinámico más preciso. Crear este modelo suele ser muy complejo y difícil. Además, el entorno submarino real es variable y difícil de predecir, por lo que los parámetros del modelo pueden cambiar con un cambio en el entorno. Los investigadores han estado utilizando la dinámica de fluidos computacional para crear modelos hidrodinámicos para robots submarinos.
Sin embargo, los modelos creados solo con dinámica de fluidos computacional no son tan precisos y prácticos como deberían ser. Para superar este desafío, el equipo de investigación probó un enfoque diferente. "Para hacer que el modelo hidrodinámico sea más preciso y práctico, combinamos la dinámica de fluidos computacional y un experimento de medición de fuerza", dijo Rui Wang, investigador del Instituto de Automatización de la Academia de Ciencias de China.
Crédito:Rui Wang, Instituto de Automatización, Academia China de Ciencias
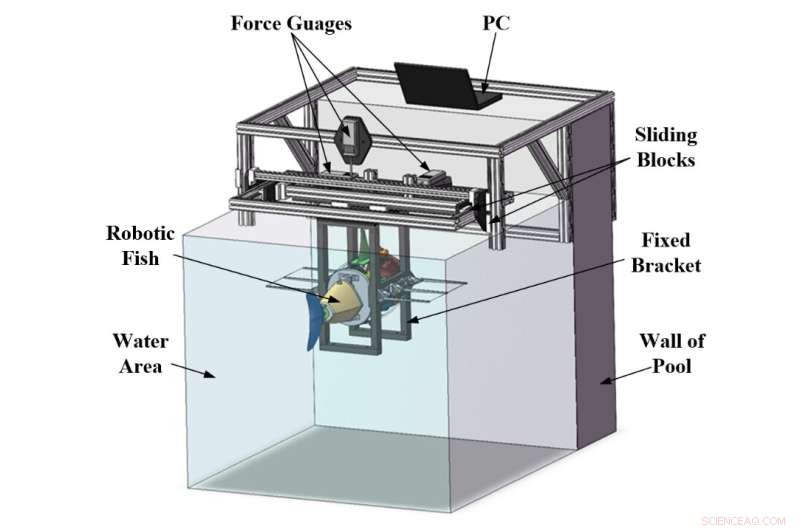
Usando dinámica de fluidos computacional, los investigadores identificaron los parámetros en el modelo hidrodinámico. Luego desarrollaron una plataforma de medición de fuerza para obtener la fuerza generada por el vehículo RobDact. Con este proceso, podrían obtener tanto la fuerza perturbadora como la fuerza generada por RobDact en cualquier entorno complejo. "Esto podría ayudarnos a tener una mejor comprensión del estado de movimiento del vehículo submarino y controlar el vehículo submarino con mayor precisión", dijo Qiyuan Cao, investigador del Instituto de Automatización de la Academia de Ciencias de China.
Con su experimento, el equipo pudo determinar la fuerza hidrodinámica del RobDact a diferentes velocidades. La plataforma de medición de fuerza que desarrollaron les permitió medir la fuerza de RobDact en las direcciones X, Y y Z. Establecieron una relación de mapeo entre los parámetros de fluctuación de RobDact y el empuje del vehículo a través de sus experimentos de medición de fuerza. Al fusionar el modelo dinámico de cuerpo rígido de RobDact con el modelo de mapeo de empuje, los investigadores pudieron desarrollar un modelo hidrodinámico preciso y práctico de RobDact en diferentes movimientos.
De cara al futuro, los investigadores pretenden estudiar el control inteligente de vehículos submarinos biónicos utilizando el modelo hidrodinámico junto con métodos de inteligencia artificial, como el aprendizaje por refuerzo. "El objetivo final es promover la aplicación práctica de los vehículos submarinos biónicos en el monitoreo del entorno acuático y la búsqueda y rescate submarinos", dijo Wang. Un método inspirado en los castores para guiar los movimientos de un robot nadador con una sola pierna














