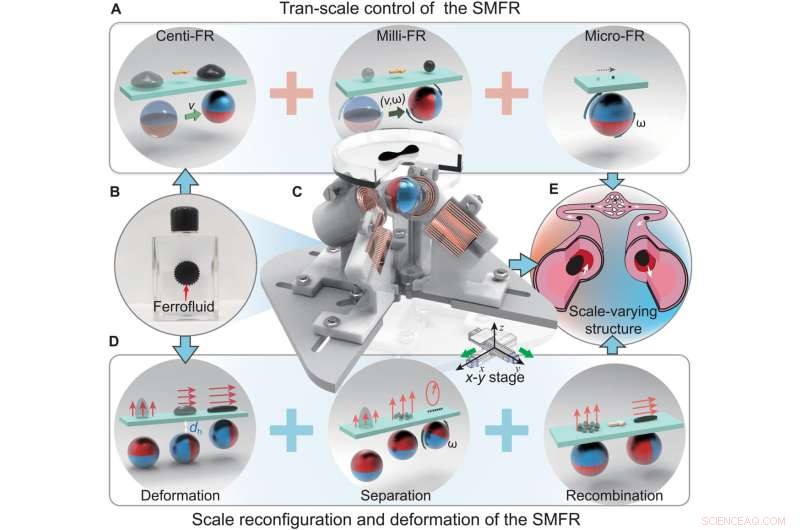
Descripción general de las estrategias de reconfiguración de escala y maniobra a escala de los robots ferrofluídicos en miniatura reconfigurables a escala (SMFR). (A) Control transescala del SMFR:locomoción del centi-FR, mili-FR y micro-FR en función del gradiente magnético, tanto el gradiente magnético como el par, y el par magnético solamente, respectivamente. (B) Comportamientos de respuesta de gotas de ferrofluido en campos magnéticos. (C) El SMFR es manipulado por un sistema de actuación magnética de diseño personalizado (el sistema M3RA) compuesto por cuatro electroimanes, un imán permanente esférico (SPM) y una etapa de traducción motorizada. Para observar fácilmente la composición interna del sistema, ocultamos una cuarta parte de la estructura. (D) Deformación y reconfiguración de escala del SMFR:deformación por estiramiento, reducción de escala a través de la separación y aumento de escala a través de la recombinación. La flecha roja representa la dirección de polarización del campo magnético. (E) Escenario de aplicación típico del SMFR basado en la combinación de las capacidades anteriores:locomoción en un espacio muy variable como la red vascular. Crédito:Avances científicos (2022). DOI:10.1126/sciadv.abq1677
Un equipo de investigadores de la Universidad de Soochow, en colaboración con dos colegas del Instituto Max Planck para Sistemas Inteligentes y otro del Instituto de Tecnología de Harbin, ha desarrollado un tipo de robot blando que se puede dividir en componentes más pequeños para atravesar espacios pequeños y luego volver a ensamblar. En su artículo publicado en la revista Science Advances , el grupo describe cómo fabricaron sus diminutos robots y sugieren posibles usos para ellos.
A medida que la ciencia de la robótica continúa madurando, los ingenieros de todo el mundo continúan encontrando nuevas formas de fabricarlos. En este nuevo esfuerzo, los investigadores hicieron el suyo a partir de un ferrofluido (nanopartículas de óxido de hierro magnético) que suspendieron en un aceite transparente. El robot se controla mediante imanes externos.
El uso de un robot hecho de un material que solo se mantiene unido de manera muy suelta, señalan los investigadores, permite la alteración de su forma a pedido. Al aplicar múltiples campos magnéticos, demostraron que era posible dirigir su robot a través de un laberinto, a veces cambiando su forma para superar obstáculos. Lo obligaron a alargarse, por ejemplo, para pasar por un pasillo estrecho. También lo dividieron en un número deseado de partes más pequeñas para pasar a través de un material poroso. En ambos casos, el robot se volvió a ensamblar fácilmente en una sola forma de robot redondo y continuó con su viaje. Señalan que tal robot podría fabricarse en una amplia variedad de tamaños.
El robot posiblemente podría usarse en aplicaciones médicas como un medio para transportar medicamentos a partes del cuerpo de difícil acceso, como los ganglios pulmonares o partes del cerebro. Los investigadores reconocen que para aplicaciones prácticas, el diseño tendría que superar muchos obstáculos, el más obvio, el desarrollo de un sistema de control magnético que pueda penetrar con precisión huesos como el cráneo. Mientras tanto, otros han señalado que un sistema robótico de este tipo podría resultar útil en dispositivos de laboratorio en un chip donde se llevan a cabo procesos químicos para tareas como la detección de virus. Los pequeños robots nuevos tal vez podrían usarse para transportar los productos químicos necesarios para las reacciones.
© 2022 Red Ciencia X Baba magnética reconfigurable sobre la marcha utilizada como robot