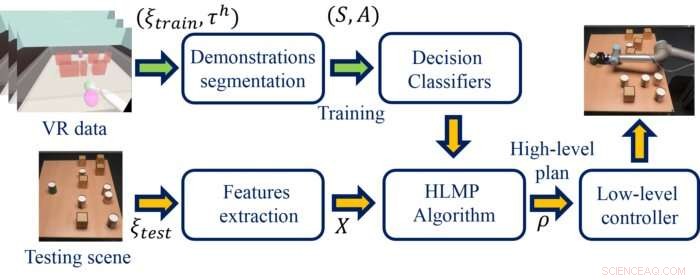
Figura delineando cómo funciona el planificador similar a un humano. Crédito:Hasan et al.
Si bien la investigación en el campo de la robótica ha dado lugar a avances significativos en los últimos años, todavía existen diferencias sustanciales en cómo los humanos y los robots manejan los objetos. De hecho, incluso los robots más sofisticados desarrollados hasta ahora luchan por igualar las habilidades de manipulación de objetos del niño promedio. Un aspecto particular de la manipulación de objetos que la mayoría de los robots aún no dominan es alcanzar y agarrar objetos específicos en un entorno desordenado.
Para superar esta limitación, como parte de un proyecto financiado por EPSRC, Investigadores de la Universidad de Leeds han desarrollado recientemente un planificador robótico similar a un humano que combina técnicas de realidad virtual (VR) y aprendizaje automático (ML). Este nuevo planificador, presentado en un artículo prepublicado en arXiv y que se presentará en la Conferencia Internacional sobre Robótica y Automatización (ICRA), podría mejorar el rendimiento de una variedad de robots en tareas de manipulación de objetos.
"Nuestro objetivo de investigación es desarrollar mejores sistemas robóticos; sistemas que puedan ayudar a los humanos en una variedad de tareas, que van desde explorar entornos peligrosos hasta ayudar a un niño a aprender a escribir, "Prof. Anthony G. Cohn, investigador principal del estudio, dijo a TechXplore. "Así que formamos un grupo multidisciplinario de psicólogos e informáticos para explorar si podíamos capturar el comportamiento de los humanos y aplicar ingeniería inversa a las reglas que los humanos usan cuando alcanzan objetos".
En contraste con otros investigadores que entrenaron clasificadores de aprendizaje automático en imágenes de entornos desordenados, Cohn y sus colegas querían generar datos de entrenamiento utilizando nuevas tecnologías inmersivas. En su estudio, por lo tanto, utilizaron equipos de realidad virtual para recopilar datos sobre humanos que completaban tareas de manipulación.
Después, utilizaron clasificadores de aprendizaje automático para analizar los datos de realidad virtual que recopilaron y extraer reglas generales que pueden ser la base de la toma de decisiones humanas. El planificador utiliza estas reglas para planificar estrategias eficientes para que los robots completen tareas de manipulación de objetos.
"Queríamos que los planes resultantes ejecutados por el robot también fueran 'legibles para humanos, "en el sentido de que serían los que un humano esperaría que otro humano ejecutara, que no es el caso de muchos planes de robots actuales, "Cohn explicó.
Las decisiones de los humanos que están completando tareas de manipulación parecen estar guiadas principalmente por representaciones cualitativas (es decir, no la distancia exacta y la dirección de todos los objetos en su entorno circundante, sino distancias y direcciones relativas). En su estudio, los investigadores intentaron comprender mejor estos procesos de toma de decisiones para reproducirlos en parte en clasificadores ML.
"Exploramos cómo los humanos llegan a escenarios donde los objetos que agarran tienen relaciones espaciales particulares y usamos métodos desarrollados por investigadores de inteligencia artificial en la Universidad de Leeds para describir cualitativamente dónde estaban ubicados los objetos, "Dr. Mohamed Hasan, un investigador que trabaja en el proyecto, explicado. "Esto significaba que el planificador podía clasificar las relaciones espaciales cualitativas entre objetos y luego seleccionar las acciones que los humanos usarían en ese escenario".
El enfoque propuesto por Cohn y sus colegas permite a los robots identificar acciones efectivas para alcanzar un objeto en un espacio desordenado mucho más rápido de lo que lo harían si tuvieran que considerar todas las acciones posibles. Lo hace produciendo un plan de alto nivel, que se representa como una secuencia de waypoints y movimientos clave. Este plan se transmite a un planificador estándar de bajo nivel, que lo utiliza para planificar trayectorias detalladas para el brazo del robot.
"Nuestro planificador funciona de una manera que se asemeja al proceso de planificar un viaje al elegir qué ciudades atravesar y solo más tarde decidir exactamente qué carreteras y carriles tomar, ", Dijo Cohn." Descubrimos que este enfoque hace que nuestro planificador similar a un humano sea mucho más eficiente que los planificadores existentes ".
Los investigadores evaluaron su planificador en una serie de experimentos, probándolo en escenarios de realidad virtual donde los humanos completaron tareas de manipulación en simulaciones de robots basadas en la física y utilizando una pinza robótica real. Las tres evaluaciones arrojaron resultados muy prometedores, con el planificador de apariencia humana superando a un estado de la técnica, algoritmo estándar de optimización de trayectoria.
El planificador ideado por Cohn y sus colegas pudo generar estrategias efectivas que permitieron a los robots alcanzar objetos en entornos desordenados de manera más rápida y eficiente de lo que lo harían al usar las técnicas estándar de optimización de trayectoria. Además de presentar un planificador prometedor similar a un humano para las tareas de manipulación de robots, el estudio muestra que la tecnología de realidad virtual se puede utilizar para estudiar el comportamiento humano y obtener una mejor comprensión de los procesos de toma de decisiones.
"Nuestra plataforma de realidad virtual, que fue desarrollado internamente en la Universidad de Leeds, nos permitió registrar cientos de alcances en un corto período de tiempo, pero también podríamos cambiar el diseño del entorno entre cada ensayo y presentar fácilmente exactamente el mismo entorno a diferentes participantes humanos, "dijo el profesor Mark Mon-Williams, co-investigador y psicólogo cognitivo, explicado. "Nuestros hallazgos respaldan nuestras sugerencias recientes de que la realidad virtual se convertirá en una de las herramientas más ubicuas en la investigación psicológica. Sin embargo, también descubrimos que las reglas que sustentan la selección de la acción humana pueden ser capturadas por métodos ML".
En el futuro, el planificador desarrollado por Cohn y sus colegas podría ayudar a mejorar las habilidades de manipulación de robots nuevos y existentes, permitiendo a las máquinas seleccionar acciones de manera más eficiente y potencialmente incluso explicar el "razonamiento" detrás de sus decisiones. Este estudio reciente también podría alentar a otros investigadores a utilizar datos de realidad virtual al investigar los procesos de toma de decisiones en humanos. que luego podría reproducirse mejor en máquinas.
El objetivo final de la investigación es construir robots inteligentes que comprendan y anticipen las intenciones humanas en escenarios de colaboración humano-robot. Idealmente, Dichos robots también podrían responder de manera similar a los humanos, comunicarse con usuarios humanos de manera similar a como lo haría otro humano.
"El trabajo actual es una prueba de concepto, por lo que ahora planeamos tomar el método que desarrollamos y explotar su inmenso potencial, "Mon-Williams dijo." Ha quedado claro que esta combinación de informática y psicología es un enfoque muy útil que tiene el potencial de arrojar luz sobre la selección de la acción humana, que es importante por varias razones, incluida la comprensión de cómo tratar afecciones médicas como accidentes cerebrovasculares, además de ayudarnos a diseñar robots más eficientes. Actualmente estamos trabajando en nuestra próxima serie de experimentos y proyectos ".
© 2020 Science X Network