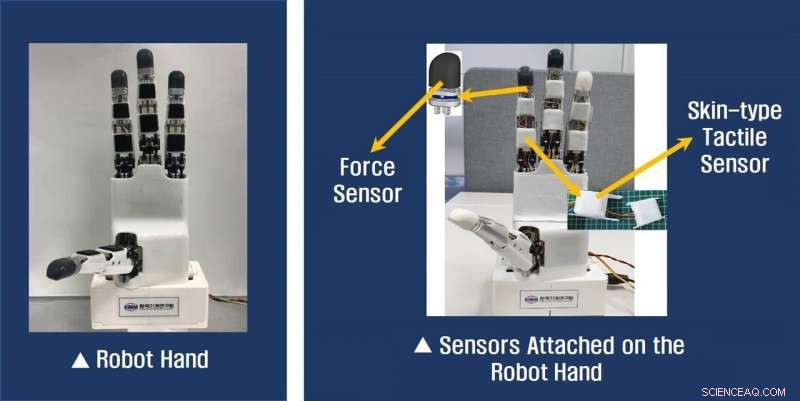
Mano robótica con sensor táctil integrado. Crédito:Instituto de Maquinaria y Materiales de Corea (KIMM)
El Instituto de Maquinaria y Materiales de Corea (presidente Chunhong Park; en adelante "KIMM") desarrolló una mano robótica capaz de manejar varios objetos y herramientas en la vida diaria, como sostener un huevo y cortar papel con unas tijeras. La mano se puede montar fácilmente en una variedad de brazos robóticos, y ofrece la fuerza de agarre más fuerte del mundo contra su propio peso. Se espera que el uso de manos robóticas se extienda a los sitios industriales, así como a la vida cotidiana.
El equipo dirigido por el Dr. Hyunmin Do, investigador principal del Departamento de Robótica y Mecatrónica de la División de Investigación de Sistemas de Fabricación Avanzados de KIMM, desarrolló una mano robótica capaz de manipular objetos de la misma manera que las manos humanas imitando la estructura y el movimiento de los dedos humanos.
La mano del robot está compuesta por cuatro dedos y 16 articulaciones. Se utilizan un total de 12 motores para mover cada dedo y articulación de forma independiente.
El equipo de investigación desarrolló un mecanismo único para apoyar el movimiento en espacios pequeños con un alto grado de libertad, similar al movimiento de una mano humana. Lograron modularizar la unidad de conducción responsable del movimiento de los dedos incrustándola dentro de la palma. La mano robótica se puede montar fácilmente en una variedad de brazos robóticos.
Además, La mano robótica desarrollada es más ligera y resistente que las manos robóticas disponibles comercialmente. Su peso es inferior a 1 kg, pero su carga útil es de más de 3 kg.
El equipo de investigación desarrolló dos tipos de sensores de fuerza para permitir la detección táctil para detectar el contacto con objetos, y los adjuntó a las yemas de los dedos, dedos y palma. Los sensores conectados a la punta de los dedos son sensores de fuerza / par de varios ejes con un diámetro de 15 mm y un peso de menos de 5 g. Pueden medir la magnitud y la dirección de la fuerza detectada en la punta del dedo cuando la mano del robot entra en contacto con un objeto. Los sensores son la clave para controlar la fuerza de agarre.
Los sensores táctiles de tipo piel desarrollados a través de una investigación conjunta con la Universidad Nacional de Seúl también se conectaron a los dedos y la palma. Estos sensores miden la distribución de la fuerza en el área de contacto cuando la mano del robot toca un objeto.
Las manos robóticas comerciales desarrolladas hasta ahora tienen aplicaciones limitadas, ya que no hay productos modularizados equipados con unidades de conducción incrustadas dentro del área de la palma y sensores táctiles integrados.
El Dr. Hyunmin Do dijo:"La mano robótica fue desarrollada para manejar varios objetos, incluidas las herramientas que se utilizan en la vida cotidiana, imitando el delicado movimiento de una mano humana. También se espera que se utilice como plataforma de investigación para estudiar el algoritmo de agarre de la mano robótica y la inteligencia de manipulación. "