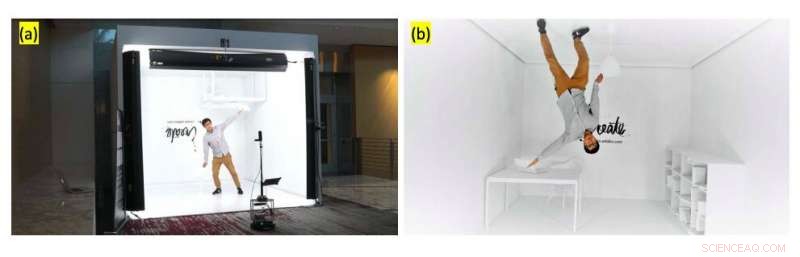
El robot impulsado por LeRop en funcionamiento. Crédito:Kang et al.
Tomar fotografías de buena calidad puede ser una tarea desafiante, ya que normalmente requiere encontrar ubicaciones ideales, ángulos y condiciones de iluminación. Aunque las fotografías artísticas hasta ahora han sido tomadas principalmente por fotógrafos humanos, en años recientes, algunos investigadores han comenzado a investigar la posibilidad de tomar fotografías automáticamente utilizando robots.
Para tal fin, un equipo de investigadores de la Universidad de Purdue y Adobe Research ha desarrollado recientemente un nuevo marco que permite a un robot capturar automáticamente fotografías de humanos, específicamente retratos. Este marco, presentado en un artículo prepublicado en arXiv, hace que los robots sigan a un usuario humano hasta un lugar ideal y luego le tomen una foto.
LeRop, el marco desarrollado por los investigadores, fue diseñado específicamente para tomar retratos de sujetos humanos en interiores. Primero, el marco guía a un robot hacia una ubicación favorable o deseada para tomar fotografías y luego utiliza un modelo de evaluación de fotografías para proponer las mejores vistas, así como el modelo de aprendizaje por refuerzo profundo (DRL) para ajustar la posición y orientación del robot para garantizar las mejores condiciones de iluminación.
"Cuando la redacción está activada, el robot intenta ajustar su posición para formar la vista que mejor se adapte a la imagen de la plantilla dada y finalmente toma una fotografía, "escribieron los investigadores en su artículo." Una imagen de plantilla se puede predecir dinámicamente usando un modelo de evaluación de fotos listo para usar por el marco, o seleccionado manualmente de un conjunto predefinido por el usuario ".
LeRop es un marco interactivo, ya que los usuarios pueden programarlo para que siga a un objetivo hasta el lugar donde desea capturar una fotografía. Una vez que el usuario llega a ese lugar, el robot comienza a buscar la mejor vista para capturar. El componente DRL de LeRop es lo que finalmente le permite ajustar su punto de vista en función de cómo se corresponde con las imágenes de la plantilla.
Los investigadores decidieron equipar al robot con una cámara de 360 grados y una cámara principal de alta calidad. ya que esto le permite tener una vista completa de su entorno en todo momento sin rotar continuamente o cambiar a diferentes puntos de vista. Curiosamente, el marco tiene una estructura modular, lo que significa que todos sus modelos pueden ser reemplazados o adaptados en función de las necesidades del usuario.
El equipo evaluó LeRop en una variedad de pruebas de prueba en tres escenas interiores, integrándolo dentro de un simple robot llamado Turtlebot. El robot tomó 20 fotografías de un usuario humano en cada uno de estos tres escenarios, 10 con una plantilla predefinida y 10 usando plantillas que generó dinámicamente.
El número medio de ajustes realizados por el robot fue de 11,20 para las plantillas predefinidas y de 12,76 para las generadas dinámicamente. Además, utilizando el marco de trabajo de los investigadores, el robot podía tomar fotografías en un tiempo medio de 22,11 segundos utilizando plantillas predefinidas y 22,40 segundos utilizando las generadas dinámicamente.
El marco LeRop podría ser un primer paso hacia la creación de un sistema de fotografía robótico eficiente que pueda tomar retratos de alta calidad de forma rápida y automática. Sin embargo, el sistema desarrollado por los investigadores todavía tiene una serie de limitaciones que podrían impedir su adopción a gran escala. Por ejemplo, hasta aquí, tiene una potencia de cálculo integrada limitada, y, por lo tanto, solo funciona en una computadora remota potente.
Además, los investigadores hasta ahora solo lo han integrado dentro de Turtlebot, que es un robot simple con muy pocos grados de libertad. En sus próximos trabajos, les gustaría probar su sistema en un robot más complejo con más grados de libertad.
"Actualmente, nuestro sistema solo admite retratos de una sola persona, ", escribieron los investigadores." Las nuevas políticas necesitarían ser reentrenadas para obtener un mejor apoyo en la toma de fotografías grupales. En el trabajo futuro, también nos gustaría probar diferentes modelos estéticos de evaluación fotográfica y extender el trabajo a escenas al aire libre ".
© 2019 Science X Network