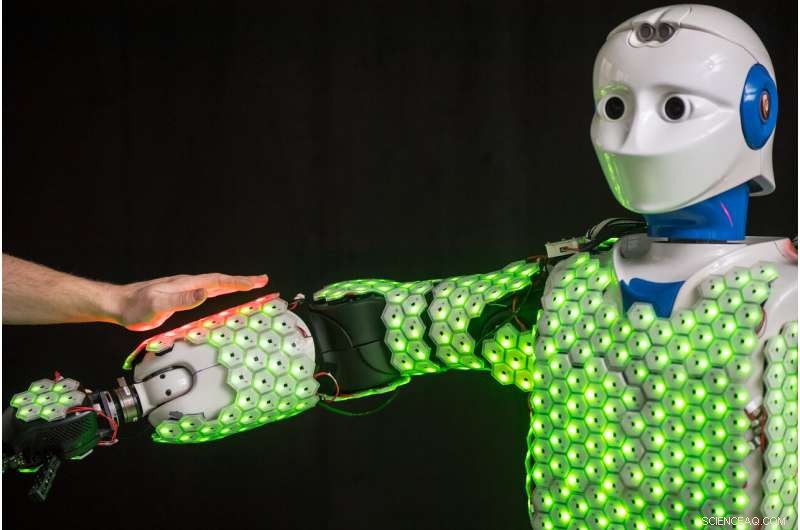
Cada célula de esta piel artificial desarrollada por investigadores de la Universidad Técnica de Munich (TUM) está equipada con un microprocesador y sensores para detectar el contacto, aceleración, proximidad y temperatura. Los nuevos algoritmos de control hicieron posible por primera vez aplicar piel artificial a un robot de tamaño humano. Crédito:Astrid Eckert / TUM
La piel sintética sensible permite a los robots sentir sus propios cuerpos y alrededores, una capacidad crucial si quieren estar en estrecho contacto con las personas. Inspirado en la piel humana, Un equipo de la Universidad Técnica de Múnich (TUM) ha desarrollado un sistema que combina piel artificial con algoritmos de control y lo ha utilizado para crear el primer robot humanoide autónomo con piel artificial de cuerpo completo.
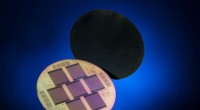
La piel artificial desarrollada por el profesor Gordon Cheng y su equipo consta de celdas hexagonales del tamaño de una moneda de dos euros (es decir, aproximadamente una pulgada de diámetro). Cada uno está equipado con un microprocesador y sensores para detectar el contacto, aceleración, proximidad y temperatura. Esta piel artificial permite a los robots percibir su entorno con mucho mayor detalle y sensibilidad. Esto no solo les ayuda a moverse con seguridad. También los hace más seguros cuando operan cerca de personas y les da la capacidad de anticipar y evitar activamente accidentes.
Las propias células de la piel fueron desarrolladas hace unos 10 años por Gordon Cheng, Catedrático de Sistemas Cognitivos en TUM. Pero esta invención solo reveló todo su potencial cuando se integra en un sistema sofisticado como se describe en el último número de la revista. Actas del IEEE .
Más capacidad informática a través de un enfoque basado en eventos
El mayor obstáculo en el desarrollo de la piel de un robot siempre ha sido la capacidad informática. La piel humana tiene alrededor de 5 millones de receptores. Los esfuerzos para implementar el procesamiento continuo de datos de sensores en piel artificial pronto se topan con límites. Los sistemas anteriores se sobrecargaron rápidamente con datos de unos pocos cientos de sensores.
Para superar este problema, utilizando un enfoque de neuroingeniería, Gordon Cheng y su equipo no controlan las células de la piel de forma continua, sino más bien con un sistema basado en eventos. Esto reduce el esfuerzo de procesamiento hasta en un 90 por ciento. El truco:las células individuales transmiten información de sus sensores solo cuando se cambian los valores. Esto es similar a la forma en que funciona el sistema nervioso humano. Por ejemplo, sentimos un sombrero cuando nos lo ponemos por primera vez, pero rápidamente nos acostumbramos a la sensación. No hay necesidad de volver a fijarse en el sombrero hasta que el viento se lo quite de la cabeza. Esto permite que nuestro sistema nervioso se concentre en nuevas impresiones que requieren una respuesta física.
Seguridad incluso en caso de contacto corporal cercano
Con el enfoque basado en eventos, El profesor Cheng y su equipo han logrado aplicar piel artificial a un robot autónomo de tamaño humano que no depende de ningún cálculo externo. El robot H-1 está equipado con 1260 celdas (con más de 13000 sensores) en la parte superior del cuerpo, brazos, piernas e incluso las plantas de sus pies. Esto le da una nueva "sensación corporal". Por ejemplo, con sus pies sensibles, H-1 es capaz de responder a superficies irregulares del piso e incluso mantener el equilibrio sobre una pierna.
Con su piel especial, el H-1 puede incluso abrazar a una persona de forma segura. Eso es menos trivial de lo que parece:los robots pueden ejercer fuerzas que dañarían gravemente a un ser humano. Durante un abrazo dos cuerpos se tocan en muchos lugares diferentes. El robot debe utilizar esta información compleja para calcular los movimientos correctos y ejercer las presiones de contacto correctas. "Esto podría no ser tan importante en aplicaciones industriales, pero en áreas como la atención de enfermería, los robots deben estar diseñados para un contacto muy estrecho con las personas, "explica Gordon Cheng.
Crédito:Universidad Técnica de Munich
Versátil y robusto
El sistema de piel de robot de Gordon Cheng también es muy robusto y versátil. Debido a que la piel está formada por células, y ni una sola pieza de material, permanece funcional incluso si algunas células dejan de funcionar. "Nuestro sistema está diseñado para funcionar sin problemas y rápidamente con todo tipo de robots, ", dice Gordon Cheng." Ahora estamos trabajando para crear células cutáneas más pequeñas con el potencial de producirse en grandes cantidades ".