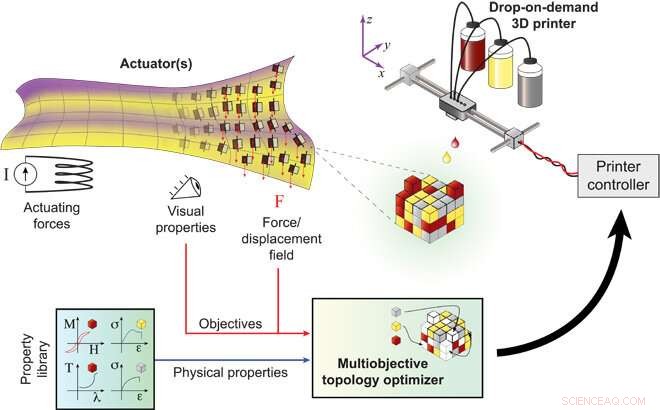
Descripción general del proceso de impresión 3D basado en especificaciones. La estructura de los actuadores individuales (o la disposición de varios actuadores) se optimiza mediante un proceso de optimización de topología multiobjetivo. Tenga en cuenta que, en general, la estructura optimizada final puede tener cualquier forma arbitraria como se muestra. La optimización utiliza las propiedades físicas generales de los materiales individuales y los objetivos funcionales como entradas. La impresora utiliza la representación de la estructura basada en vóxeles optimizada generada para fabricar la estructura optimizada mediante un proceso de impresión de inyección de tinta de gota a demanda. Esto permite que los diseños de altas dimensiones se generen y fabriquen automáticamente con una mínima intervención humana. En este trabajo, un polímero de acrilato rígido (RIG), un polímero de acrilato elástico (ELA), y una nanopartícula magnética (Fe3O4) / compuesto de polímero (MPC) son los principales materiales utilizados. El contraste en la óptica, mecánico, y las propiedades magnéticas se utilizan para optimizar simultáneamente la apariencia visual y las fuerzas de actuación mientras se genera el diseño a nivel de vóxel. Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
En ciencia de materiales y física aplicada, los investigadores esperan que los sistemas de actuación funcionen de manera similar a los fenómenos naturales. Como ejemplo clásico, los científicos propusieron diseñar materiales bioinspirados que imitaran el camuflaje de la sepia, aunque la ingeniería de estos sistemas altamente integrados puede ser un desafío debido a la complejidad combinada de generar diseños arquitectónicos de alta dimensión y materiales multifuncionales asociados con su proceso de fabricación. En un informe reciente sobre Avances de la ciencia , Subramanian Sundaram y colegas de los departamentos de informática, La inteligencia artificial y la ingeniería eléctrica en los EE. UU. y Francia presentaron un protocolo completo sobre optimización de topología multiobjetivo e impresión tridimensional (3-D) multimaterial drop-on-demand para diseñar actuadores complejos.
Los actuadores contenían polímeros rígidos y blandos acoplados a un compuesto de polímero / nanopartícula magnética que respondía a un campo magnético. El optimizador de topología podría asignar materiales para vóxeles individuales para mejorar la apariencia física de alta resolución. Cuando unificaron la estrategia de diseño optimizado de topología con el proceso de fabricación multimaterial, Sundaram y col. podría diseñar actuadores complejos como una ruta prometedora hacia la fabricación automatizada y orientada a objetivos.
Los robots modernos requieren actuadores que integren múltiples funciones juntas dentro de un solo paquete para optimizar la altura, eficiencia energetica, topología, tamaño y otras métricas de rendimiento. Esta idea subyace en las propuestas de investigación que abogan por la estrecha integración de la detección, actuación y computación con materiales robóticos. Los investigadores aún debaten si los robots serán cuerpos con cerebro o cerebros con cuerpo y, por lo tanto, aún queda por establecer una distinción entre materiales y máquinas. El nuevo paradigma con materiales robóticos requiere que las partes del robot estén diseñadas para múltiples funciones y optimizadas para múltiples objetivos como ocurre con los organismos naturales.
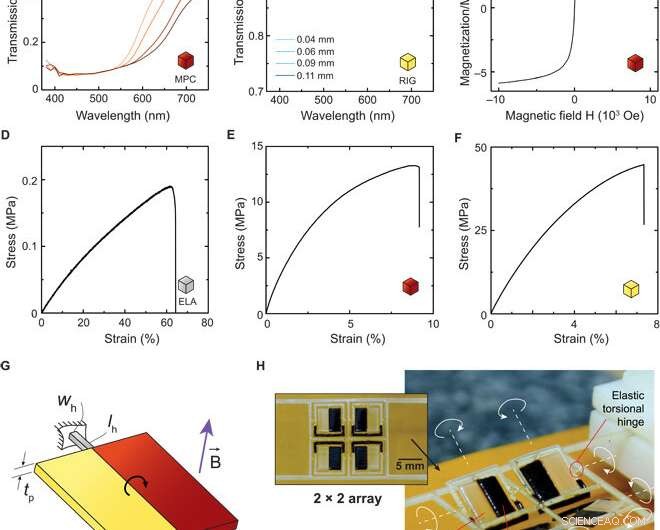
Biblioteca de propiedades materiales. (A) La transmisión a través del MPC mostrada como una función de la longitud de onda para películas de espesor variable, medido con un espectrofotómetro. (B) La transmisión a través del material rígido transparente que se muestra como una función de la longitud de onda para múltiples espesores de película. (C) Magnetización versus campo magnético aplicado para el MPC medido a temperatura ambiente. Las nanopartículas magnéticas constituyen aproximadamente el 12% del peso total del MPC. Curvas típicas de tensión-deformación mecánica para ELA, MPC, y el polímero rígido (RIG) se muestran en (D) a (F), respectivamente. Módulos elásticos de los polímeros a deformaciones lineales, promediado de tres muestras cada uno, varían significativamente:ELA (528 kPa), MPC (507 MPa), y RIG (1290 MPa). (G) El esquema muestra el diseño fundamental basado en bisagras con una longitud de panel lp y un espesor tp. En este diseño, el panel se divide en dos porciones iguales de RIG y MPC. El panel se fija a límites rígidos en dos lados con bisagras torsionales ELA de longitud lh, ancho wh, y espesor th. Sobre la aplicación de un campo magnético, la parte magnética del panel genera un par. Esto se utiliza como bloque fundamental en las muestras diseñadas manualmente. (H) Imagen de un conjunto de paneles de 2 × 2, cada uno con dos ejes de rotación. Las regiones de color marrón oscuro de la imagen muestran el material MPC, y las porciones translúcidas muestran los materiales rígidos. Las bisagras elásticas de torsión son casi idénticas al polímero rígido en apariencia. Sobre la aplicación de un campo magnético, cada panel exhibe una combinación única de rotaciones angulares de dos ejes. La vista superior de la muestra plana tal como está impresa se muestra a la izquierda. (Crédito de la foto:S.S. y D.S.K., MIT.) Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
El desafío de reproducir sistemas multifuncionales bioinspirados sigue estando en el diseño de sistemas de actuación. En el ejemplo clásico de un sistema de actuación de una sepia, el control simultáneo de las desviaciones físicas y la apariencia de alta resolución da como resultado un camuflaje biológico eficaz. Reproducir esta actuación perfectamente integrada en el laboratorio es engorroso debido a la complejidad de crear un espacio de diseño de alta dimensión y fabricar estos diseños con nuevos materiales y geometrías de forma libre.
En ejemplos contemporáneos de sistemas de actuación, Los científicos de materiales han desarrollado un dispositivo de microespejos digitales con millones de actuadores idénticos y un sistema de almacenamiento de datos de alta densidad 'milpiés' con voladizos del sistema microelectromecánico. Optimización de estos sistemas de actuación para el consumo de energía, la baja huella y la confiabilidad del proceso consumen mucho tiempo, mientras que las matrices de actuadores no uniformes presentaron una complejidad adicional en el laboratorio. Como alternativa prometedora, Las técnicas de optimización de topología ofrecen diseños de material optimizados automáticamente en un espacio de diseño determinado.
En el presente trabajo, Sundaram y col. utilizó una estrategia de recocido simulado previamente utilizada como un enfoque exitoso de optimización de topología para diseñar estructuras de celosía. Si bien es muy genérico en teoría, el enfoque tuvo en cuenta las especificidades del problema para ser eficaz en la práctica. En el enfoque actual, Sundaram y col. considerado el papel de los materiales, donde la técnica era completamente consciente de la fabricación. El estudio propuesto en alta resolución, El marco de optimización de topología multifísica y consciente de la fabricación es una primera estrategia implementada en el presente trabajo.
Los científicos utilizaron un proceso de fabricación de precisión capaz de manejar diseños de alta dimensión para fabricar el actuador sintético. Después de eso, eligieron un enfoque de fabricación aditiva rápida en 3-D para la fabricación de actuadores con el fin de producir estructuras complejas con diversos materiales. El creciente interés en los actuadores impresos en 3-D se debe a su velocidad y aplicabilidad en robótica a micro / mesoescala.
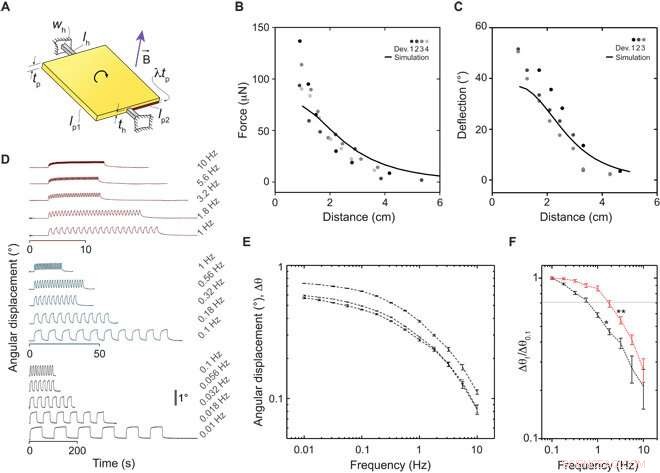
Características del actuador:fuerzas, desplazamientos, y ancho de banda de actuación. (A) Para caracterizar el desempeño del actuador, los científicos utilizaron el diseño fundamental con un pequeño cambio. Aquí, solo una fracción del espesor del panel, tp, está lleno de MPC, denotado por λ. Los siguientes resultados se obtuvieron con un panel rectangular de tamaño lp1 × lp2 =8 mm × 9 mm, espesor tp =1 mm, λ =0,15, y bisagras con dimensiones Wh =0,5 mm, lh =1 mm, y th =0,25 mm. (B) Fuerzas de bloqueo medidas de cuatro dispositivos idénticos que se muestran como una función de la distancia desde el imán de 2 ″ por 2 ″ por 0,5 ″ junto con los resultados de simulación correspondientes. (C) Desviaciones angulares medidas de tres dispositivos idénticos en función de la distancia desde el imán. (D) Desplazamientos angulares con seguimiento óptico en función del tiempo de actuación a frecuencias de 0,01 a 10 Hz. (E) Amplitudes de desplazamiento angular en función de la frecuencia para tres dispositivos. (F) El ancho de banda aparente de gran amplitud depende de la configuración del campo magnético, ya que la fuerza experimentada por el propio actuador varía con el desplazamiento. Esto se destaca en este gráfico con dos casos:en un caso, la fuerza experimentada por el actuador aumenta monótonamente con el desplazamiento angular (⋆), y en el otro caso, hay un desplazamiento angular estable cuando el panel se alinea con la dirección de máxima pendiente (⋆⋆). Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
Los científicos habían explorado previamente la propiedad de la actuación magnética de la materia blanda debido a la escala favorable, alta densidad de fuerza de actuación y actuación sin ataduras. Sundaram y col. unificó una técnica de optimización evolutiva biomimética con un proceso automatizado de fabricación aditiva multimaterial para diseñar y fabricar rápidamente actuadores de alta dimensión en el presente trabajo. El enfoque podría eventualmente permitir la fabricación completamente automatizada de diseños de alta dimensión, que es un objetivo a largo plazo en robótica.
Los investigadores implementaron el proceso de impresión 3D personalizado drop-on-demand para optimizar toda la línea de fabricación y realizar mejoras conscientes de la fabricación. Diseñaron un actuador específico en un plano, estructura rígida con células sintéticas rellenas con un polímero rígido transparente o un polímero oscuro que responde magnéticamente. El optimizador de topología controlaba la ubicación de los dos materiales en relación con sus propiedades materiales para aplicaciones óptimas. Sundaram y col. luego combinó un proceso personalizado de impresión 3D de gota a demanda con múltiples materiales con optimización de topología de múltiples objetivos para diseñar los diseños de actuadores de alta dimensión en el laboratorio. Crearon un conjunto de tintas curables ultravioleta (UV) con una variedad de efectos que incluyen ópticos, propiedades magnéticas y mecánicas, luego caracterizó las muestras para generar una biblioteca de propiedades.
El nenúfar impreso se coloca en las interfaces de los fluidos y se activa mediante un imán permanente. Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
Los científicos utilizaron una impresora 3D multimaterial de inyección de tinta hecha a medida. Utilizaron un polímero de acrilato rígido (RIG), un polímero de acrilato elástico (ELA) y un compuesto de polímero de nanopartículas magnéticas (MPC) junto con tintas de partida optimizadas para el proceso de impresión por inyección de tinta. Después de la deposición de tinta, utilizaron una matriz de diodos emisores de luz ultravioleta (LED) para reticular la tinta mediante fotopolimerización de radicales libres. Los tres materiales contenían módulos elásticos y propiedades de los materiales que variaban ampliamente, lo que les permitía realizar juntas blandas y estructuras rígidas para su uso como actuadores. Los científicos demostraron sus capacidades y fabricaron una variedad de conjuntos de actuadores multimaterial diseñados manualmente. Hicieron ciclos de los actuadores diseñados y fabricados durante al menos 1000 ciclos sin degradación del rendimiento.
Sundaram y col. investigó las aplicaciones de actuadores magnéticos blandos impresos en 3-D basados en múltiples materiales que utilizan un electroimán alimentado por una fuente de corriente para generar un campo magnético sintonizable. Como prueba de concepto, desarrollaron cuatro pétalos individuales para la activación magnética en una interfaz aire-agua, donde los pétalos emergieron de la interfaz de agua. Para una actuación repetible, colocaron las muestras impresas en una interfaz aceite-agua de silicona. Estos ejemplos diseñados manualmente fueron los primeros en destacar la fabricación aditiva multimaterial junto con la actuación magnética. La estrategia de impresión multimaterial perfectamente integrada y optimización de topología para demostrar propiedades ópticas de alta resolución.
Optimización topológica de actuadores. Crédito:Science Advances, doi:10.1126 / sciadv.aaw1160
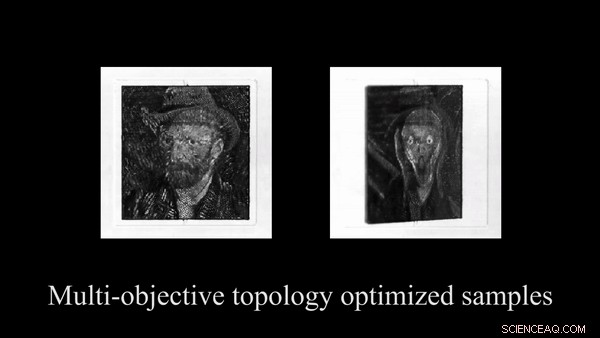
Los científicos optimizaron la topología multiobjetivo utilizando software de simulación para comprender la distribución de las células MPC (compuesto de polímero de nanopartículas magnéticas) para la activación magnética. Luego aplicaron el método a dos imágenes diferentes de pinturas que incluían un autorretrato de Van Gogh y el "Grito" de Munch. Después de aplicar el marco de optimización de topología, controlaron la actuación magnética con un campo magnético aplicado para hacer una transición gradual de las imágenes del retrato de Van Gogh al retrato de Munch aumentando los ángulos de inclinación / deflexión. Luego, los científicos caracterizaron el actuador con topología optimizada con pruebas a largo plazo.
De este modo, Subramanian Sundaram y sus colegas desarrollaron un optimizador de topología para igualar las propiedades ópticas del objetivo y sus ángulos de inclinación. Los científicos, además, combinaron una impresión 3D basada en inyección de tinta de gota a demanda con la técnica de optimización para diseñar diseños con topología optimizada y generar propiedades ópticas de alta resolución. Aunque existen desafíos en el desarrollo de nuevas tintas y materiales, podrían fabricar una amplia gama de materiales utilizando el proceso.
Los investigadores pueden diseñar toda la tubería de fabricación para una mayor libertad de control con optimización consciente de la fabricación. El actuador con topología optimizada y el kit de herramientas de fabricación adjunto se pueden utilizar para diseñar actuadores con sensores y elementos informáticos básicos para lograr la visión de larga data de compuestos robóticos / autónomos multifuncionales con integración y autosuficiencia a gran escala. Cuando los científicos exploren más a fondo estas estrategias fundamentales, podrán formar actuadores multifuncionales con una mínima intervención humana.
© 2019 Science X Network