Vehículos aéreos no tripulados híbridos, o vehículos aéreos no tripulados, son drones que combinan las ventajas de los multicópteros y los aviones de ala fija. Estos drones están equipados para despegar y aterrizar verticalmente como multicópteros, pero también tienen el fuerte rendimiento aerodinámico y las capacidades de ahorro de energía de los aviones tradicionales. A medida que los UAV híbridos continúan evolucionando, sin embargo, controlarlos de forma remota sigue siendo un desafío. Crédito:Jie Xu
Vehículos aéreos no tripulados híbridos, o vehículos aéreos no tripulados, son drones que combinan las ventajas de los multicópteros y los aviones de ala fija. Estos drones están equipados para despegar y aterrizar verticalmente como multicópteros, pero también tienen el fuerte rendimiento aerodinámico y las capacidades de ahorro de energía de los aviones tradicionales. A medida que los UAV híbridos continúan evolucionando, sin embargo, controlarlos de forma remota sigue siendo un desafío.
Un equipo del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del Instituto de Tecnología de Massachusetts ha ideado un nuevo enfoque para diseñar automáticamente un agnóstico del modelo, Controlador impulsado por IA para cualquier UAV híbrido. El equipo presentará su novedoso diseño de controlador computacional en SIGGRAPH 2019, celebrada del 28 de julio al 1 de agosto en Los Ángeles. Esta reunión anual presenta a los principales profesionales del mundo, académica, y mentes creativas a la vanguardia de los gráficos por computadora y las técnicas interactivas.
Para controlar UAV híbridos, un sistema dirige los rotores del modelo de helicóptero del vehículo para que se desplacen y otro diferente dirige los rotores del modelo de avión para la velocidad y la distancia. En efecto, Controlar los UAV híbridos es un desafío debido a la complejidad de la dinámica de vuelo del vehículo. Típicamente, Los controladores se han diseñado manualmente y son un proceso que requiere mucho tiempo.
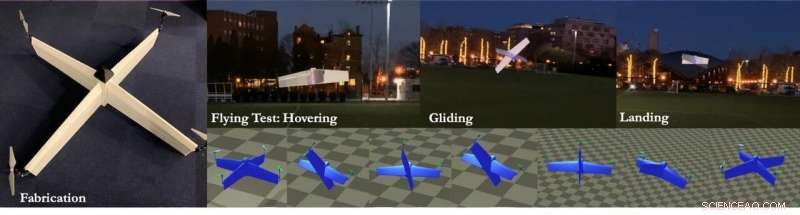
En este trabajo, el equipo abordó cómo diseñar automáticamente un solo controlador para los diferentes modos de vuelo (modo helicóptero, modo de deslizamiento, transición, etc.) y cómo generalizar el método de diseño del controlador para cualquier modelo de UAV, forma, o estructura.
"Diseñar un controlador para un diseño tan híbrido requiere un alto nivel de experiencia y requiere mucha mano de obra, "dice Jie Xu del MIT y coautor de la investigación." Con nuestro método de diseño de controlador automático, cualquier no experto podría introducir su nuevo modelo de UAV en el sistema, espere unas horas para calcular el controlador, y luego tener sus propios UAV personalizados volando en el aire. Esta plataforma puede hacer que los UAV híbridos sean mucho más accesibles para todos ".
El método de los investigadores consiste en un diseño de controlador basado en una red neuronal entrenado mediante técnicas de aprendizaje por refuerzo. En su nuevo sistema, Los usuarios primero diseñan la geometría de un UAV híbrido seleccionando y haciendo coincidir las piezas de un conjunto de datos proporcionado. Luego, el diseño se utiliza en un simulador realista para calcular y probar automáticamente el rendimiento de vuelo del UAV. Luego, se aplica el algoritmo de aprendizaje por refuerzo para aprender automáticamente un controlador para el UAV para lograr el mejor rendimiento en la simulación de alta fidelidad. El equipo validó con éxito su método tanto en simulación como en pruebas de vuelo reales.
Con la prevalencia continua de vehículos aéreos no tripulados híbridos, en la industria aérea y los sectores militares, por ejemplo, existe una creciente necesidad de simplificar y automatizar el diseño de controladores. En este trabajo, los investigadores tenían como objetivo ofrecer un método novedoso independiente del modelo para automatizar el diseño de controladores para vehículos con configuraciones muy diferentes.
En el trabajo futuro, el equipo tiene la intención de investigar cómo aumentar la maniobrabilidad a través de un diseño de geometría mejorado (forma, posiciones de rotores / alas) para que pueda ayudar a perfeccionar el rendimiento de vuelo del UAV.