Crédito:Obute, Dogar y Boyle.
Muchos animales y microorganismos pueden realizar tareas complejas, como encontrar comida o construir nidos, Como un equipo, o "enjambre". Uno de los ejemplos más obvios de esto son las abejas, ya que su supervivencia como grupo depende en gran medida de la cooperación con otros miembros de su colonia. En los ultimos años, un número creciente de investigadores ha intentado reproducir estas fascinantes dinámicas de grupo en robots, dando lugar a un área de estudio denominada robótica de enjambres.
Investigadores de la Universidad de Leeds han presentado recientemente un nuevo enfoque de robótica de enjambre llamado quimiotaxis, inspirado por un comportamiento particular observado en microorganismos, . Su estudio, prepublicado en arXiv, proviene del interés de los autores en la supervivencia de animales invertebrados simples en entornos dinámicos del mundo real, y cómo se pueden aplicar estas estrategias en robots.
"Durante mi doctorado y primera beca posdoctoral, Estudié el sistema de locomoción de un pequeño gusano llamado C. elegans (un organismo modelo popular), y apliqué con éxito lo que aprendí para controlar la locomoción de un robot con forma de serpiente, "Jordan Boyle, uno de los investigadores que realizó el estudio, dijo a TechXplore. "El trabajo actual está inspirado en el mismo organismo, Pero esta vez, observando su comportamiento de nivel superior, específicamente la forma en que navega hacia las fuentes de alimentos utilizando su sentido del olfato ".
En ausencia de entradas sensoriales, C. elegans los gusanos normalmente avanzan, pero haz grandes giros a intervalos de tiempo aleatorios. Si sienten que un olor "positivo" se hace más fuerte a medida que se mueven en una dirección particular, la frecuencia de sus giros disminuye. Inversamente, cuando el olor "positivo" o "deseado" se debilita, hay una mayor probabilidad de que se vuelvan. Este comportamiento, conocido como quimiotaxis, en última instancia, les permite gravitar hacia lugares donde un estímulo sensorial deseado está en su punto máximo. En su estudio, Boyle, su colega Mehmet Dogar y Ph.D. El estudiante Simon Obute se propuso replicar esta estrategia de grupo en enjambres robóticos y evaluar su utilidad.
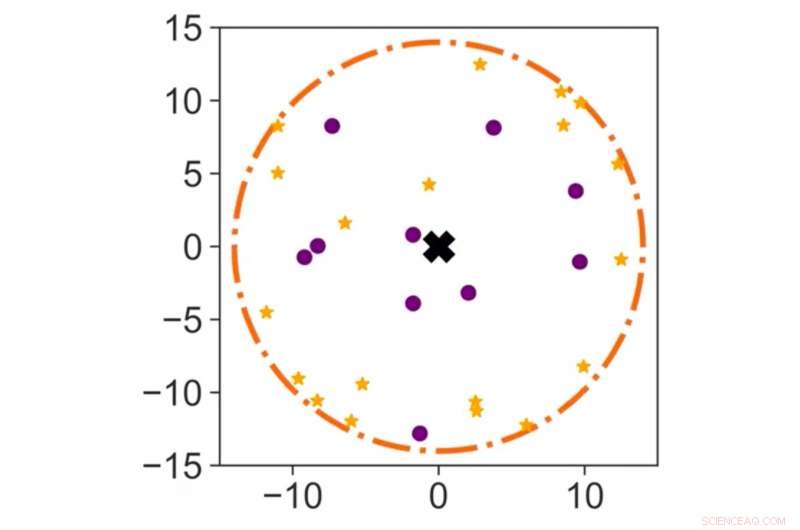
"Un beneficio clave de esta estrategia es que solo necesita un sensor analógico, porque los gradientes se detectan con el tiempo a medida que el animal se mueve, "Explicó Boyle." En nuestro trabajo, hemos reemplazado el olor por el sonido, porque es mucho más fácil de crear y sentir con un robot, y también se debilita a medida que se aleja de la fuente, "Explicó Boyle." Las ventajas clave de este enfoque es que permite que un grupo de robots enjambre se limite a un área específica (es decir, alrededor de una fuente de sonido) sin necesidad de un límite físico, capacidad cartográfica o sistemas sensoriales complejos ".
Usando un algoritmo que desarrollaron, los investigadores aplicaron quimiotaxis a un enjambre de robots de exploración, en última instancia, los impulsa a regresar a un área de trabajo determinada alrededor de su nido situado dentro de un entorno ilimitado. Probaron su desempeño, y, por tanto, la eficacia de su enfoque, en una serie de experimentos de simulación y validación de hardware. Aunque sus resultados se basan principalmente en simulaciones y no en implementaciones del mundo real, los investigadores encontraron que lograron incorporar modelos precisos de propagación del sonido.
"Nuestros resultados de hardware son preliminares pero prometedores en este momento, "Dijo Boyle." En última instancia, este trabajo podría ser relevante para enjambres físicos que consisten en muy pequeños, Robots baratos con capacidades sensoriales y computacionales limitadas. Si bien es práctico, el despliegue de enjambres de robots en el mundo real aún está lejos, tienen potencial en muchas aplicaciones ".
En el futuro, Los experimentos con robots reales podrían ayudar a determinar la eficacia de este nuevo enfoque bioinspirado. Si estas pruebas arrojan resultados positivos, el algoritmo desarrollado por Boyle y sus colegas podría eventualmente usarse para mejorar las estrategias de navegación y orientación de los enjambres robóticos, especialmente cuando los entornos en los que navegan no están claramente definidos o cartografiados.
Obute ahora está trabajando en la integración de la quimiotaxis en sistemas robóticos de enjambre más complejos, tanto en simulaciones como en algunos experimentos de hardware. Su doctorado final. El proyecto investiga específicamente la posibilidad de utilizar robots de enjambre para la recogida de basura urbana. Boyle, por otra parte, plans to continue exploring biological strategies that could prove particularly useful for robotics applications.
"En la actualidad, I'm interested in applying similar techniques to a major project I'm involved in that aims to develop robot systems for monitoring the integrity of sewer and water distribution networks, " Boyle said.
© 2019 Science X Network