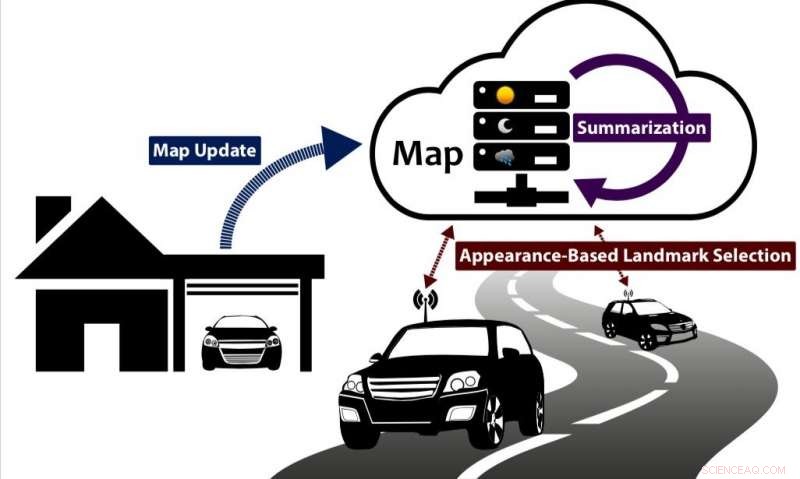
Una descripción esquemática de nuestro sistema de localización y cartografía visual "completo". Crédito:Bürki et al.
Investigadores del Laboratorio de Sistemas Autónomos de ETH Zürich han desarrollado recientemente un proceso de gestión de mapas para sistemas de localización visual, diseñado específicamente para operaciones en entornos al aire libre que involucran a varios vehículos. Su estudio, presentado en el Simposio de vehículos inteligentes (IV) de este año y disponible en arXiv, aborda el desafío clave de incorporar grandes cantidades de datos de localización visual en un mapa visual de por vida, con el fin de proporcionar una localización eficaz de forma constante en todas las condiciones de apariencia.
"La autolocalización es fundamental para cualquier tipo de robot móvil, incluidos los vehículos autónomos, "Mathias Bürki, uno de los investigadores que realizó el estudio, le dijo a Tech Xplore. "Si bien la mayoría de los vehículos de investigación autónomos están equipados con sensores LiDAR 3D, estos siguen siendo caros, y su idoneidad para la futura producción en masa es, por tanto, cuestionable. Por otra parte, los sensores de la cámara son muy baratos, y ya se han abierto camino en las flotas automotrices actuales (por ejemplo, para sistemas de asistente de estacionamiento). Por lo tanto, hemos estado investigando el potencial de usar cámaras como sensor principal para la localización precisa de vehículos autónomos ".
Uno de los principales desafíos que se encuentran al desarrollar sistemas de localización visual para entornos al aire libre es garantizar que estos sistemas se adapten bien a los cambios de apariencia. Estos incluyen ambos cambios que ocurren a corto plazo (por ejemplo, iluminación, oscuridad, etc.) y a largo plazo (por ejemplo, cambios estacionales, follaje, etc.).
Investigaciones anteriores encontraron que los mapas creados para la localización visual podrían teóricamente adaptarse para trabajar en diferentes condiciones de apariencia al aire libre. Sin embargo, adaptar estos mapas puede resultar muy caro, requiriendo recursos sustanciales gastados en los servidores que mantienen los mapas y en los propios vehículos autónomos. Si bien hay una serie de soluciones que podrían ayudar a reducir los costos y abordar la complejidad de este problema, hasta aquí, estos solo se han investigado de forma aislada.
"El objetivo de nuestra investigación reciente fue combinar diferentes componentes y enfoques que mejoran la escalabilidad, como el resumen de mapas sin conexión, y selección de puntos de referencia en línea basada en la apariencia, para construir un sistema de localización y mapeo completamente escalable y eficiente en recursos, "Explica Bürki." También queríamos investigar en detalle qué tan bien funciona este sistema en el mundo real, condiciones a largo plazo, cuánto tardan los mapas visuales en converger a un estado estable, qué tan bien funcionan juntos los diferentes componentes relacionados con la escalabilidad, y si uno interfiere con el otro de una manera no deseada ".
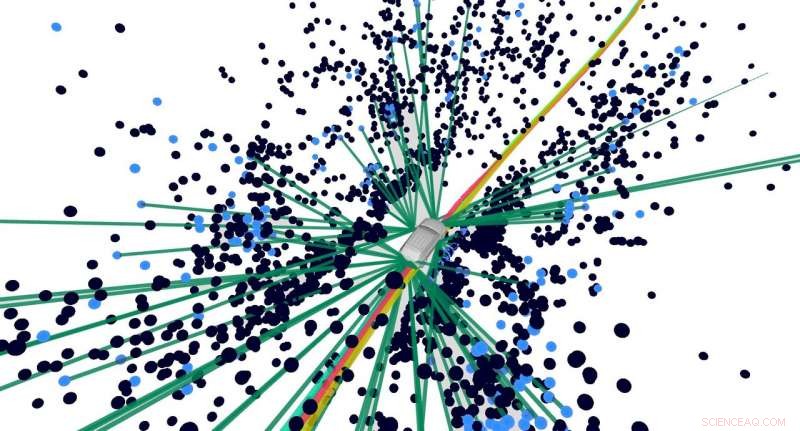
Una captura de pantalla del sistema de localización visual de los investigadores. Las esferas de color azul claro y oscuro indican la posición 3D de los puntos de referencia visuales que se utilizan para la localización. El azul claro indica los que se están seleccionando mediante la selección de puntos de referencia basada en la apariencia, mientras que los oscuros son los que se descartan. Las líneas verdosas indican coincidencias entre las imágenes de la cámara en vivo en el automóvil (desde el frente, izquierda-, cámara trasera y derecha), y los puntos de referencia 3D en el mapa. A través de estos partidos, la ubicación (posición, orientación) del automóvil. Las líneas gruesas de colores ilustran las trayectorias por las que conducía el automóvil durante la grabación de los conjuntos de datos que se utilizaron para construir el mapa de múltiples sesiones. Crédito:Bürki et al.
El proceso de gestión de mapas desarrollado por Bürki y sus colegas funciona agregando nuevos conjuntos de datos al mapa a lo largo del tiempo, actualizándolo continuamente para hacer frente mejor a las nuevas condiciones de apariencia. Cada vez que se agrega un nuevo conjunto de datos al mapa, un paso posterior de resumen del mapa asegura que su tamaño no exceda un cierto límite.
"Si el nuevo conjunto de datos se registró en condiciones de apariencia que ya están bien cubiertas por el mapa, el conjunto de datos no se agrega al mapa, pero se mejoran las estadísticas sobre las observaciones históricas, que, a cambio, hace que la selección de puntos de referencia basada en la apariencia en futuras salidas sea más eficiente, "Explica Bürki.
Los investigadores probaron el nuevo proceso de gestión de mapas en el mundo real en condiciones exteriores desafiantes. Los resultados de sus evaluaciones fueron muy prometedores, sugiriendo que su mecanismo de gestión de mapas livianos podría ayudar a desarrollar sistemas de localización visual para vehículos autónomos que funcionen bien en diferentes condiciones de apariencia, al mismo tiempo que rinde mejor en la selección de puntos de referencia.
"Nuestro hallazgo más significativo fue que de hecho es posible y prácticamente factible construir un sistema de localización y mapeo visual que a) sea, y sigue siendo eficiente, b) es, y sigue siendo escalable, yc) ofrece una localización precisa en entornos exteriores a largo plazo, "Otro hallazgo fue que la selección de puntos de referencia en línea basada en la apariencia y el resumen de mapas fuera de línea funcionan bien juntos y se complementan", dijo Bürki.
En el futuro, La mayoría de los vehículos autónomos de alto rendimiento probablemente estarán equipados con sensores 3D LiDAR, dado que estos parecen en la actualidad imprescindibles para garantizar la seguridad y hacer que el vehículo perciba efectivamente los obstáculos en su entorno, incluidos los peatones. Recientemente, el costo de estos sensores ha disminuido sustancialmente, lo que también podría facilitar su adopción generalizada en los próximos años.
"Ahora centraremos nuestra investigación más en la cuestión de cómo se pueden utilizar los sensores LiDAR para respaldar la localización visual, ", Dijo Bürki." Especialmente en condiciones de poca luz, las cámaras inevitablemente alcanzan sus límites, mientras que los LiDAR también son adecuados para condiciones de oscuridad ".
© 2018 Tech Xplore