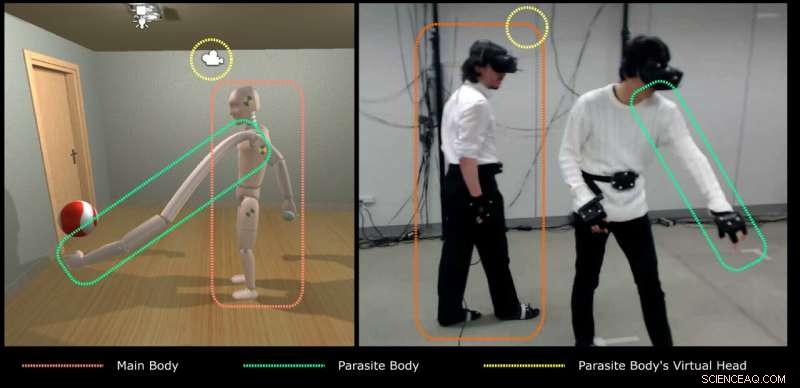
El cuerpo parasitario en dos contextos. A la izquierda, la perspectiva de la realidad virtual. A la derecha, el espacio real con ambos participantes. El participante de la izquierda (indicado en rojo) controla el cuerpo principal. El participante de la derecha (indicado en verde) controla el miembro parásito. El círculo amarillo indica la posición de la cámara en ambos contextos. Crédito:Takizawa et al.
Los avances recientes en robótica han permitido el desarrollo de sistemas para ayudar a los humanos en una variedad de tareas. Un tipo de sistema robótico que ha ganado una popularidad sustancial en los últimos años son los brazos robóticos portátiles operados remotamente por un tercero.
Al ayudar a los usuarios, estos brazos necesitan recopilar información visual y compartirla con el operador externo. Esta retroalimentación se puede recopilar de varias formas, el más común es colocar una cámara en el usuario que 'aloja' el brazo robótico, también conocido como operador principal del cuerpo (MBO). Este enfoque particular para recopilar datos visuales, sin embargo, puede ser algo limitante, ya que depende en gran medida de los movimientos del usuario que lleva puesto el sistema.
Con esta limitación en mente, investigadores de la Universidad de Keio, RIKEN AIP y la Universidad de Tokio han desarrollado recientemente un sistema de realidad virtual (VR) para investigar el concepto de "edición corporal, "que implica el uso de extremidades robóticas portátiles para ayudar a los humanos en las tareas diarias. Su investigación fue financiada por el programa de Investigación Exploratoria de Tecnología Avanzada (ERATO) de la Agencia de Ciencia y Tecnología de Japón (JST).
"El objetivo general de nuestro trabajo reciente fue estudiar la edición corporal como parte de nuestro grupo de investigación, ERATO JIZAI, "Adrien Verhulst, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Edición de cuerpo, como extender el cuerpo con tecnología robótica de asistencia portátil, es un concepto fácil de encontrar en algunas áreas culturales, como en la serie manga Parasyte , por Hitoshi Iwaaki. Pensamos para nosotros mismos, 'Tener un ser artificial unido a ti y asistirte es exactamente lo que estamos buscando, ', así que intentamos replicar libremente la idea en la realidad virtual ".
Verhulst y sus colegas querían llevar a cabo lo que podría denominarse un experimento de "cuerpo compartido". En lugar de proponer una solución para superar las limitaciones de los sistemas actuales para recopilar comentarios visuales, se propusieron comparar y evaluar los enfoques existentes.
Para hacer esto, desarrollaron un sistema de realidad virtual que utiliza tecnología optitrack para rastrear el cuerpo de un usuario y una pantalla montada en la cabeza (HMD) para ver la dirección de los cuerpos del brazo robótico y del MBO. En su papel los investigadores se refieren al usuario del brazo robótico como el "cuerpo principal" y al teleoperador externo como el "cuerpo parásito".
"Es lógico pensar que si el 'cuerpo del parásito' está adherido al cuerpo principal, luego, cuando el cuerpo principal se mueve, el parásito va a acabar enfermo, ¿verdad? ", dijo Verhulst." En consecuencia, las preguntas que nos hicimos son:¿Cómo debemos adaptar la retroalimentación visual recopilada por el cuerpo? ¿Debería ser una tercera vista? como en un videojuego? Entonces, ¿dónde debe colocarse:sobre el cuerpo principal, en el lado, o más bien cerca de la acción? ¿Quizás podríamos compartir la misma opinión? ¿O una vista en función del movimiento de ambas personas? "
Los equipos de diferentes empresas e instituciones han presentado varios enfoques para recopilar comentarios visuales de los brazos robóticos. Los más destacados son el concepto de "vista compartida", la vista en tercera persona y la vista cercana a la acción.
Como lo sugieren sus nombres, el enfoque de vista compartida recopila información visual que coincide con lo que ve el usuario que lleva el brazo robótico; la tercera persona ve lo que una tercera persona vería si estuviera al lado o detrás del usuario, y la vista cercana a la acción muestra un primer plano de la tarea que se está completando. Los investigadores querían investigar si estos diferentes modos de vista deberían depender del movimiento del cuerpo principal, el cuerpo del parásito, o ambos.
Para explorar esta pregunta, llevaron a cabo un experimento en 16 usuarios humanos utilizando el sistema de realidad virtual que desarrollaron. Esto les permitió obtener información interesante sobre diferentes enfoques para la recopilación de comentarios visuales. Sin embargo, sus hallazgos aún son preliminares, ya que el número de personas que participaron en su estudio es limitado.
"Las personas necesitan sentirse orientadas en la dirección de su extremidad para poder usarlo. Prueba esto:si colocas una cámara frente a ti en un ángulo extraño, y solo puedes verte a ti mismo desde esa cámara, tendrá más dificultad para mover el brazo en una dirección determinada, "Explicó Verhulst." Esto significa que cada vez que el cuerpo principal se mueve, el cuerpo del parásito se reorienta. Curiosamente, no notamos una gran diferencia en los puntajes de propiedad del cuerpo, lo que significa que no importa el punto de vista, los participantes sintieron que eran dueños de su cuerpo, y que ellos lo tenían bajo control ".
Las observaciones recopiladas por Verhulst y sus colegas sugieren que la dependencia del punto de vista no es tan importante. En otras palabras, si uno recopila información visual colocando una cámara en el brazo robótico, en el hombro del usuario humano, o entre los dos, él / ella todavía puede lograr la correcta "propiedad del cuerpo" cuando mira a través de la cámara.
"Los resultados que recopilamos fueron muy sorprendentes, ", Agregó Verhulst." Tampoco observamos ninguna dificultad significativa en términos de carga de trabajo (es decir, carga física, carga mental, esfuerzo, tiempo), cuales, de nuevo, insinúa que la dependencia de la cámara no importa a este respecto. Sin embargo, el rendimiento de los participantes fue un poco mejor en situaciones en las que la vista depende tanto del cuerpo principal como del parásito, insinuando que para una máxima eficacia, puede ser mejor colocar la cámara en el cuerpo principal, pero debe estar motorizado para seguir el movimiento de la persona que controla el brazo del robot ".
La investigación realizada por este equipo de investigadores se centró específicamente en la dependencia de la perspectiva de los operadores externos de brazos robóticos en tareas que implicaban encontrar y alcanzar objetos. En el futuro, el sistema de realidad virtual que desarrollaron también podría usarse para estudiar enfoques para recopilar comentarios visuales sobre tareas más elaboradas y realistas.
"El siguiente paso es crear un entorno experimental con situaciones y configuraciones más realistas, "Ryo Takizawa, otro investigador involucrado en el estudio, dijo a TechXplore. "Explorar métodos de cooperación en el trabajo colaborativo, estamos pensando en restringir los métodos de comunicación y mejorar los modelos de realidad virtual, etcétera."
Los investigadores decidieron utilizar la realidad virtual y realizar un experimento virtual porque era una solución fácil y económica que no requería el mantenimiento de sistemas robóticos avanzados. Para determinar la validez de sus hallazgos, sin embargo, eventualmente necesitarán comparar sus resultados con los obtenidos usando un brazo robótico real.
En su trabajo futuro, Verhulst y sus colegas también planean llevar a cabo un experimento similar en el que los participantes sean entrenados en la tarea que completarán de antemano. ya que creen que esto conduciría a resultados diferentes. En este estudio, De hecho, los usuarios no recibieron formación previa antes de utilizar su plataforma de realidad virtual.
"Necesitamos considerar cómo diseñar una tarea o programa de entrenamiento en un contexto corporal compartido y editado por el cuerpo, especialmente en términos de cómo suavizar, si no mejora, tareas cooperativas, "Katie Seaborn, otro investigador que participó en el estudio, dijo a TechXplore. "He estado explorando la noción de mismo tiempo, sincronía del mismo movimiento, que se ha relacionado con impulsos en el desempeño cooperativo en otros contextos. Nos preguntamos si esta estrategia de 'acción compartida' funcionaría en este caso, con dos personas que comparten un cuerpo muy inusual en la realidad virtual ".
© 2019 Science X Network