Crédito:Sun et al.
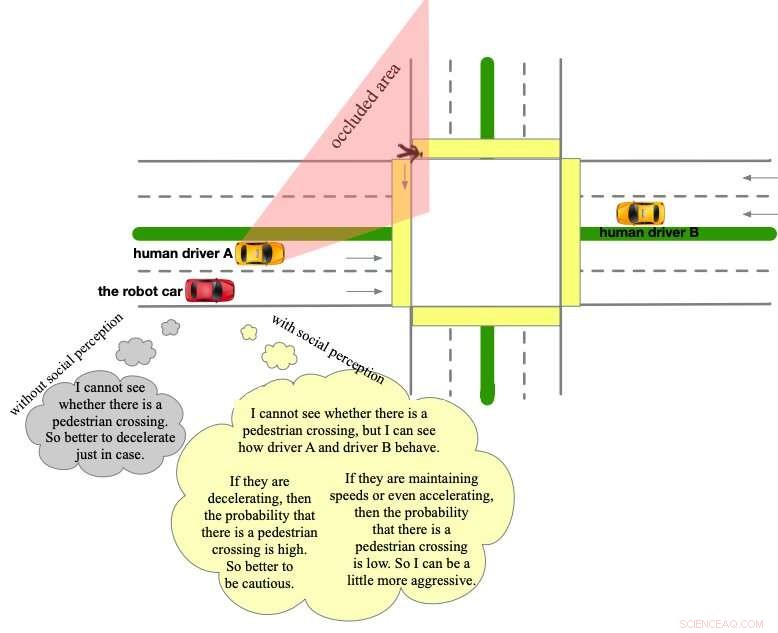
Para navegar en entornos dinámicos, Los vehículos autónomos (AV) deben poder procesar toda la información disponible y utilizarla para generar estrategias de conducción eficaces. Investigadores de la Universidad de California, Berkeley, han propuesto recientemente un esquema de percepción social para planificar el comportamiento de los automóviles autónomos, lo que podría ayudar a desarrollar vehículos autónomos mejor equipados para hacer frente a la incertidumbre en su entorno circundante.
"Mi investigación se ha centrado en cómo diseñar comportamientos de conducción similares a los humanos para automóviles autónomos, "Sol encendido, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Nuestro objetivo es crear AV que no solo comprendan el comportamiento humano, pero también funcionan de manera similar en múltiples aspectos, incluida la percepción, razonamiento y acción ".
Sun y sus colegas observaron que los conductores humanos tienden a tratar a otros vehículos como obstáculos dinámicos, a menudo infiriendo información adicional de su comportamiento en la carretera. Esta información es generalmente información del entorno ocluida o información social físicamente indetectable.
"Sería muy importante y beneficioso que los AV se comportaran de la misma manera, ya que esto los haría más inteligentes, más humano y, en última instancia, más seguro, "Dijo Sun". En este trabajo, permitimos que los AV traten a todos los demás participantes de la carretera como sensores dinámicos y distribuidos ".
El esquema de percepción social propuesto por Sun y sus colegas esencialmente trata a todos los vehículos y obstáculos en la carretera como sensores distribuidos en una red de sensores. Esto permite a los AV observar tanto los comportamientos individuales como los comportamientos grupales, utilizando sus observaciones para actualizar uniformemente diferentes tipos de incertidumbres dentro de un "espacio de creencias". El esquema se centra particularmente en las incertidumbres del estado físico (por ejemplo, causadas por oclusiones o rango limitado del sensor) y las incertidumbres de comportamiento social (por ejemplo, preferencias de conducción locales).
Luego, el esquema integra creencias de percepción social actualizadas con un marco de planificación probabilístico basado en el modelo de control predictivo (MPC), cuya función de coste se aprende mediante el aprendizaje por refuerzo inverso (IRL). Esta combinación entre un módulo de planificación probabilística y una percepción socialmente mejorada permite que los vehículos generen comportamientos defensivos que son socialmente compatibles y, por lo tanto, no demasiado estrictos.
"Al observar los comportamientos de los demás y compararlos con modelos de comportamiento anteriores, Los AV pueden razonar sobre los posibles estados de las variables indetectables utilizando solo sus propios sensores, ", Dijo Sun." Esto puede ayudar a los AV a reducir las incertidumbres de percepción, al igual que los humanos. En comparación con otros enfoques existentes, La idea de este trabajo amplía efectivamente la capacidad de percepción de los AV sin ningún hardware adicional, y puede ayudar a generar maniobras más seguras y eficientes ".
Sun y sus colegas evaluaron su marco en una serie de simulaciones con escenarios representativos con oclusiones de sensores. Descubrieron que al imitar los mecanismos de percepción social de los humanos, el módulo de percepción detectó menos incertidumbres, en última instancia, generar comportamientos AV más seguros y eficientes a través de un planificador de defensa no conservador.
"Prácticamente, esta buena característica puede hacer que los AV sean más eficientes en presencia de oclusiones, así como más adaptable a nuevos entornos de conducción, porque pueden inferir y aprender rápidamente sobre la información social físicamente indetectable en su entorno, "Sun explicó.
En el futuro, El esquema de percepción social ideado por este equipo de investigadores podría informar el desarrollo de automóviles autónomos que pueden navegar en entornos en constante cambio de manera más efectiva. Sun y sus colegas ahora planean desarrollar aún más su marco, cambiando algunas de sus suposiciones y facilitando su aplicación en situaciones de la vida real.
"Para inferir información adicional incierta de los comportamientos de otros participantes de la carretera, Los AV deben estar equipados con modelos de comportamiento previos que puedan aproximarse a los comportamientos reales de los demás. "Sun explicó." En el trabajo actual, asumimos que todos los demás participantes de la ruta son optimizadores racionales y aproximamos sus modelos de generación de comportamiento a través de funciones de recompensa. En nuestro trabajo futuro, vamos a relajar el supuesto de racionalidad para hacer la aproximación más práctica ".
© 2019 Science X Network