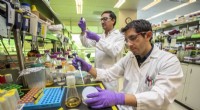
El robot de seguimiento de rostros desarrollado por Albayeros Duarte. Crédito:Albayeros Duarte &Vilariño.
Investigadores de la Universitat Autònoma de Barcelona (UAB) han desarrollado recientemente un brazo robótico de seguimiento facial con detección de emociones inspirado en la lámpara Luxo Jr. de Pixar Animation Studios. Este robot fue presentado por Vernon Stanley Albayeros Duarte, licenciado en informática por la UAB, en su tesis final.
"La idea detrás de nuestro robot se basa en gran medida en los cortos de lámpara Luxo Jr. de Pixar, Albayeros Duarte le dijo a TechXplore. “Quería construir un robot que imitara el comportamiento de la lámpara en los pantalones cortos. Estoy muy interesado en la escena de los creadores y he estado imprimiendo en 3D durante algunos años, así que me propuse construir una especie de 'mascota' para demostrar algunas interacciones interesantes entre humanos y máquinas. Aquí es de donde viene todo el tema de 'seguimiento de rostros / detección de emociones', ya que tener la lámpara saltando como los de los cortos de Pixar resultó muy difícil de implementar, pero aún conservaba la sensación de 'juguete para mascotas' sobre el proyecto ".
Como este estudio fue parte del trabajo de curso de Albayeros Duarte, tenía que cumplir con ciertos requisitos establecidos por la UAB. Por ejemplo, El objetivo principal de la tesis era que los estudiantes aprendieran sobre los servicios en la nube de Google y cómo se pueden usar para descargar recursos informáticos en proyectos que no son computacionalmente sólidos para ellos.
Raspberry Pi es una computadora pequeña y asequible, que tiene limitaciones computacionales sustanciales. Estas limitaciones lo convierten en el candidato perfecto para explorar el uso de la plataforma en la nube de Google para tareas computacionalmente intensivas. como la detección de emociones.
Albayeros Duarte decidió utilizar una Raspberry Pi para desarrollar un pequeño robot con capacidad de detección de emociones. El cuerpo principal de su robot es LittleArm 2C, un brazo robótico creado por el fundador de Slant Concepts, Gabe Bentz.
"Me comuniqué con Slant Concepts para pedir permiso para modificar su brazo robótico para que pudiera sostener una cámara al final, luego creé el gabinete de la electrónica y la base yo mismo, “Dijo Albayeros Duarte.
El robot diseñado por Albayeros Duarte 'barre' una cámara de izquierda a derecha, capturar una foto y usar OpenCV, una biblioteca de funciones de programación que se utiliza a menudo para aplicaciones de visión por computadora, para detectar un rostro dentro de su marco. Cuando el robot llega al final de cualquier lado, sube o baja la cámara un par de grados y reanuda su movimiento de barrido.
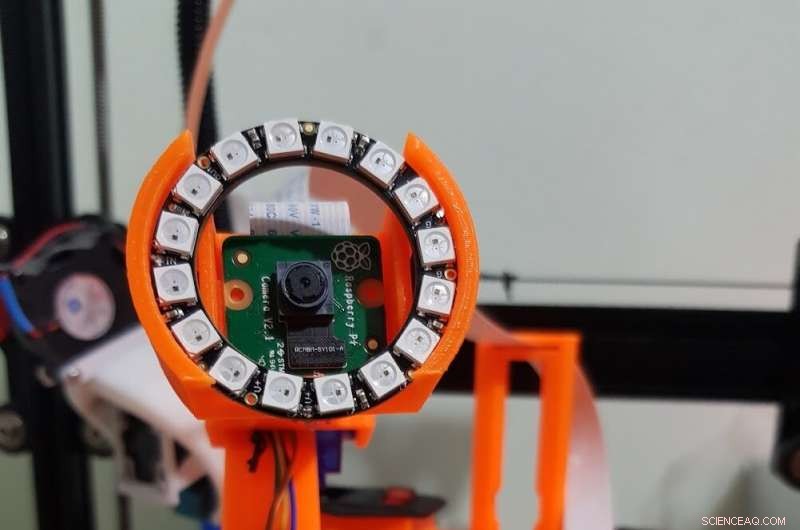
El robot de seguimiento de rostros desarrollado por Albayeros Duarte. Crédito:Albayeros Duarte &Vilariño.
"Cuando encuentra una cara, el robot detiene el movimiento de barrido y comprueba si la cara permanece dentro del campo de visión durante más de un puñado de fotogramas, Albayeros Duarte explicó. Esto asegura que no 'juega' con falsos positivos en la detección de rostros. Si el robot confirma que de hecho ha encontrado una cara, cambia a la parte de 'seguimiento de caras' del algoritmo, donde intenta mantener la cara centrada dentro de su campo de visión. Para hacer esto, gira y se inclina de acuerdo con los movimientos de la persona que está observando ".
Mientras el robot sigue los movimientos de la persona en su campo de visión, toma una foto de su rostro y la envía a la API de Cloud Vision de Google. Posteriormente, la plataforma de Google analiza la imagen y detecta el estado emocional actual de la persona en ella, clasificándolo como uno de los 5 estados emocionales:alegría, enfado, tristeza, sorpresa o neutral.
"Cuando el robot recibe los resultados de este análisis, imita cualquier estado emocional en el que se encuentre el usuario, "Dijo Albayeros Duarte." De alegría salta un poco, para la ira hace un pequeño movimiento de cabeza en señal de desaprobación, por el dolor se cae al suelo y te mira, y por sorpresa se mueve hacia atrás. El robot también tiene un anillo LED capaz de abarcar toda la gama de colores RGB, que utiliza para complementar estas acciones ".
Dependiendo de la emoción que detecte, El "comportamiento de barrido" del robot cambia. Si detecta alegría, barre un poco más rápido, para la ira, se mueve lo más rápido posible (sin comprometer la calidad de su detección de rostros), para el dolor, barre en una posición hacia abajo o 'caída' y para sorpresa, sacude al azar mientras barre. En cada uno de estos 'modos', el robot destella diferentes colores en su anillo LED RGB:amarillo y colores cálidos para la alegría, rojo brillante para la ira, colores azules y fríos para el dolor y una mezcla de amarillo y verde para la sorpresa.
"Creo que existe un enorme potencial sin explotar para los robots 'parecidos a mascotas', ", Dijo Albayeros Duarte." De hacer que los asistentes personales como Alexa de Amazon y el Asistente de Google sean más interactivos y naturales, para ayudar potencialmente a las personas con discapacidad a ser más autosuficientes a través de su ayuda, Tener un robot que responda a su estado emocional actual puede tener un gran impacto en la percepción de estos dispositivos. Por ejemplo, un asistente para personas mayores capaz de reconocer la angustia emocional podría enviar alertas tempranas en caso de que necesiten asistencia sanitaria, mientras que un robot utilizado para ayudar a desarrollar las habilidades motoras en niños con problemas de movimiento podría detectar si el niño está perdiendo el interés o si se está involucrando más en una actividad y ajustar su dificultad en consecuencia ".
Además de ser un excelente ejemplo de cómo se puede utilizar la plataforma en la nube de Google para descargar recursos computacionales, El proyecto de Albayeros Duarte proporciona un conjunto de modelos para impresión 3D que podrían usarse para reproducir su robot o crear adaptaciones del mismo, junto con la lista de materiales necesarios. En este momento, el investigador también colabora con Fernando Vilariño, Director Asociado del Centro de Visión por Computadora (CVC) y Presidente de la Red Europea de Living Labs (ENoLL), en un proyecto destinado a inspirar a las generaciones más jóvenes a seguir una carrera en STEM, así como en la construcción de la comunidad informática física en la UAB, dirigido a todos los interesados en crear sus propios proyectos.
"Hemos estado en el Festival Móvil de la Juventud de Barcelona, un Mobile World Congress (MWC) orientado a los jóvenes organizado por las mismas personas que el MWC, ", Dijo Albayeros Duarte." Sumergir los dedos de los pies en robots interactivos como este es una buena manera de construir algo que llame instantáneamente la atención de los grupos escolares en estos eventos y nos enseñe más sobre robótica a nivel del consumidor ". a diferencia de la robótica de nivel industrial ".
© 2019 Science X Network