Crédito:IIT
Los robots suelen estar inspirados en humanos y animales. Pero la próxima frontera son los plantoides, Planta robots que se mueven y exploran el medio ambiente con sensores inteligentes. La investigadora Barbara Mazzolai ha estado desarrollando tecnología plantoide.
Las vides de la región italiana de la Toscana inspiraron a los investigadores con sede en Pontedera, cerca de Pisa, quien desarrolló el primer robot blando que imita el comportamiento de los zarcillos. El dispositivo artificial, hecho del plástico PET común, puede enroscarse y trepar por un soporte para asegurar su posición, al igual que las enredaderas reales.
Este es el segundo robot vegetal creado por el equipo de investigación internacional del Centro de MicrobioRobotics del Istituto Italiano di Tecnologia (IIT) dirigido por Barbara Mazzolai, un biólogo con un Ph.D. en Ingeniería.
En 2015, desarrollaron el primer plantoide. Tiene hojas sensibles y raíces inteligentes que copian características de la planta como la obtención de nutrientes, y evitando el peligro sin ojos ni músculos. Las puntas de las raíces de las plantas tienen sensores que rastrean la luz, humedad, temperatura y nutrición. Para moverse en el suelo tienen que crecer, añadiendo células a su estructura. Para reproducir este crecimiento, el plantoide utiliza una impresora 3D.
Mazzolai dice:"Esta es una revolución en robótica, porque el robot puede crear su propio cuerpo y avanzar hacia otro estímulo de interés utilizando tecnologías de fabricación. Así que capa por capa es el robot el que construye su cuerpo ".
Además de su uso para el monitoreo ambiental en suelos, este robot puede ser flexible, endoscopio en crecimiento en un cuerpo humano, o incluso un explorador de mundos alienígenas, gracias a su capacidad de excavación, implantarse y adaptarse a las nuevas condiciones externas.
Mazzolai dice:“En el futuro tendremos plantas trepadoras. Este es un nuevo proyecto llamado GrowBot. Deben moverse contra la gravedad y no con la gravedad. Entonces el desafío es generar más adecuado, quizás más flexible, materiales para esto, mientras que tiene un mecanismo que permite que el robot se mueva contra la gravedad ".
El zarcillo artificial funciona mediante el mismo proceso físico de transporte de agua en las plantas. En la parte inferior del robot, hay un tubo de polisulfona que contiene un líquido con partículas cargadas eléctricamente (iones). Actúa como membrana osmótica. Este tubo serpentea entre capas de tejidos de fibra de carbono que funcionan como electrodos. Cuando la unidad está conectada a una batería de 1,3 voltios, estos iones son atraídos por la superficie de la tela flexible, donde se adhieren. Las partículas en movimiento hacen que el líquido fluya y, en consecuencia, el zarcillo inicia un movimiento en espiral. El robot también puede realizar el movimiento opuesto cuando la batería está desconectada.
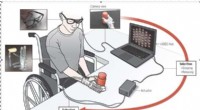
La capacidad de las enredaderas para adaptarse al entorno es copiada por el robot, allanando el camino para una serie de aplicaciones, incluido wearable, soportes ortopédicos flexibles que se adaptan a las necesidades de un paciente en rehabilitación, y zarcillos equipados con sensores o cámaras para monitorear la contaminación o rescatar personas.