El modelo desarrollado por los investigadores. Crédito:Hwang, Wirkuttis y Tani.
Investigadores del Instituto de Ciencia y Tecnología de Okinawa han propuesto recientemente un enfoque de neurorobótica que podría ayudar al desarrollo de robots con capacidades de comunicación avanzadas. Su enfoque presentado en un artículo publicado previamente en arXiv, se basa en dos características clave:dinámica neural estocástica y minimización de errores de predicción (PEM).
"Nuestra investigación se centra principalmente en la construcción de robots basados en los principios clave del cerebro, "Jungsik Hwang, uno de los investigadores que realizó el estudio, dijo a TechXplore. "En este estudio, nos centramos en el principio de minimización de errores de predicción (PEM). La idea principal es que el cerebro es una máquina de predicción, realizar predicciones de forma coherente y minimizar el error de predicción cuando una predicción difiere de las observaciones. Esta teoría se ha aplicado ampliamente para explicar muchos aspectos de las conductas cognitivas. En este estudio, tratamos de examinar si este principio se puede aplicar a una situación social ".
En años recientes, Los investigadores han llevado a cabo numerosos estudios destinados a replicar artificialmente las capacidades de comunicación innatas de muchos animales, incluidos los humanos. Si bien muchos de estos estudios han logrado resultados prometedores, la mayoría de las soluciones existentes no alcanzan una precisión comparable a la de los humanos.
"Una de las tareas desafiantes para un robot con capacidades de comunicación es reconocer la intención de otro detrás del comportamiento observado, "Explicó Hwang." Un enfoque común para resolver este problema es considerarlo como una tarea de clasificación. El objetivo entonces es obtener la etiqueta correcta (intención del usuario) con la observación dada (comportamiento del usuario) utilizando el clasificador. Estos días, la opción popular para estos clasificadores son los modelos de redes neuronales profundas, como las redes neuronales convolucionales (CNN) y la memoria a corto plazo a largo plazo (LSTM) ".

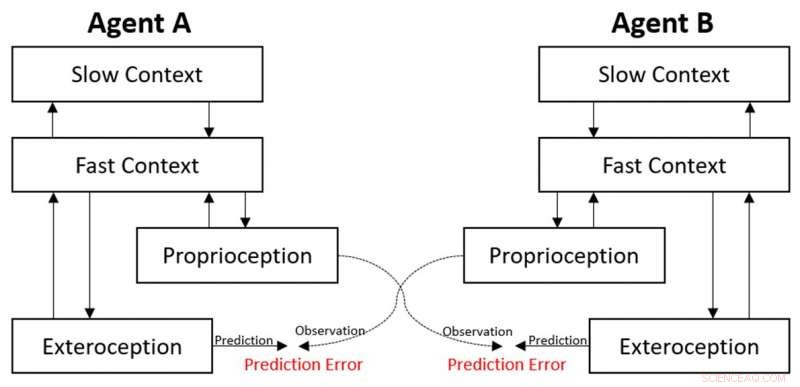
Crédito:Hwang, Wirkuttis y Tani.
En su estudio, Hwang y sus colegas propusieron un enfoque diferente para resolver este problema basado en la dinámica neural estocástica y PEM. Los investigadores aplicaron su enfoque a dos pequeños robots humanoides, llamado ROBOTIS OP2, y lo probé en diferentes situaciones que involucraron interacciones humano-robot y robot-robot.
"Utilizando nuestro enfoque, el robot hace predicciones consistentemente sobre el comportamiento del agente con el que está interactuando, ", Dijo Hwang." Cuando una predicción es diferente de su observación, el robot actualiza su creencia para que se pueda realizar la predicción correcta (es decir, minimizar el error de predicción). Por lo tanto, en este enfoque, el reconocimiento de la intención no es una tarea de clasificación, sino un proceso activo que implica actualizar las "creencias" para comprender lo que ha sucedido en el pasado reciente. En términos de aprendizaje automático, esto puede considerarse como una especie de aprendizaje en línea ".
En evaluaciones preliminares utilizando robots humanoides, Los investigadores encontraron que ser capaz de predecir el comportamiento de los demás y minimizar el error de predicción desempeñaba un papel clave en las situaciones sociales. Usando su enfoque, los robots pudieron imitar las acciones de los agentes con los que interactuaban; un usuario humano en la configuración de HRI (interacción humano-robot) y otro robot en la configuración de RRI (interacción robot-robot). Cuando su enfoque no se aplicó a los robots, por otra parte, Las interacciones de los robots con otros agentes estuvieron marcadas por patrones mundanos y comportamientos repetitivos.

Crédito:Hwang, Wirkuttis y Tani.
"Mediante el mecanismo PEM, el robot no solo puede adaptarse rápidamente a un entorno cambiante, sino también predecir lo que sucederá en el futuro, "Hwang explicó." Por lo tanto, este método se puede aplicar a otros servicios de inteligencia ambiental en los que la IA hace predicciones sobre los usuarios de manera constante y se adapta a ellos. o incluso ofrece sugerencias de forma proactiva basadas en observaciones anteriores ".
En el futuro, el enfoque desarrollado por Hwang y sus colegas podría informar el desarrollo de robots con mejores capacidades de comunicación. Curiosamente, Los investigadores también observaron que cuando dos robots interactuaban entre sí utilizando su enfoque, Surgieron algunos patrones de comunicación nuevos e inusuales, sugiriendo que su enfoque permite un tipo de comunicación más avanzado.
"Todavía hay muchas direcciones de investigación interesantes que se pueden explorar en este entorno, "Dijo Hwang." Por ejemplo, Me interesa tener una prueba de Turing gestual en la que un usuario interactúa con un robot que puede ser controlado por otra persona detrás de la pared o IA. Si no se puede identificar quién está operando el robot, ¿Podemos decir que el robot tiene la inteligencia para interactuar con la gente? ¿Qué tipo de principios del cerebro serían esenciales para ilustrar la semejanza humana en tales entornos sociales? Estas son algunas preguntas que me gustaría explorar en el futuro ".
© 2019 Science X Network